 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Safety of Students with Mobile Air Filtration during School Reopening from COVID-19
Apr 29, 2021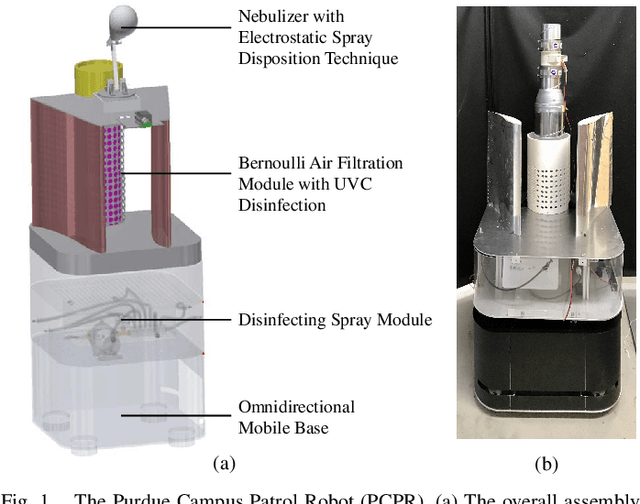
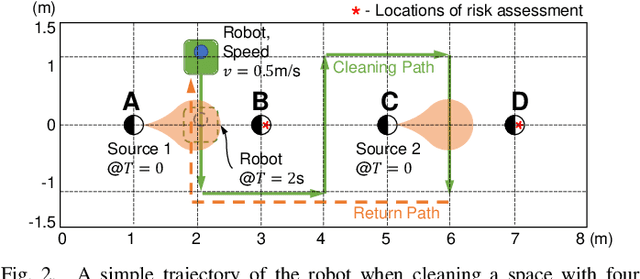
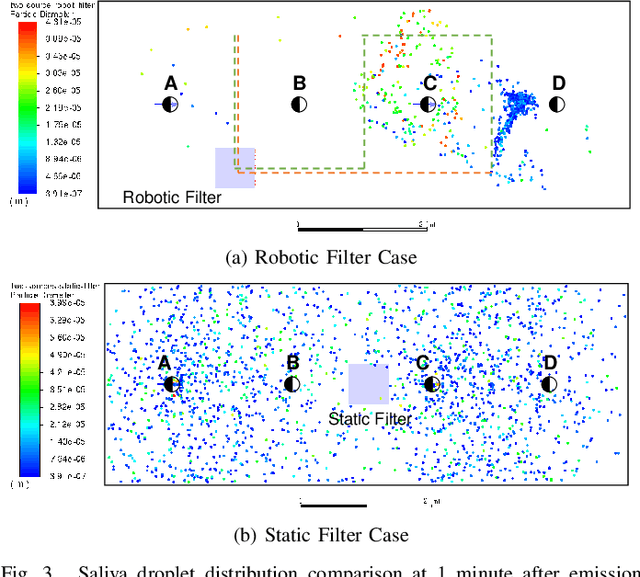
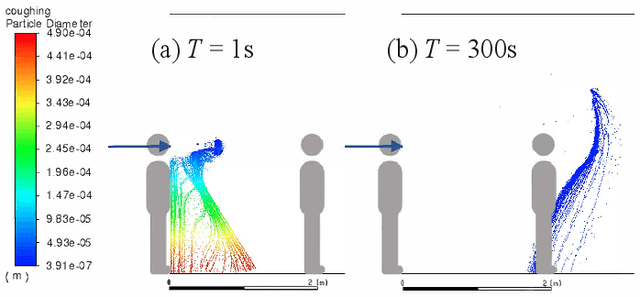
The paper discusses how robots enable occupant-safe continuous protection for students when schools reopen. Conventionally, fixed air filters are not used as a key pandemic prevention method for public indoor spaces because they are unable to trap the airborne pathogens in time in the entire room. However, by combining the mobility of a robot with air filtration, the efficacy of cleaning up the air around multiple people is largely increased. A disinfection co-robot prototype is thus developed to provide continuous and occupant-friendly protection to people gathering indoors, specifically for students in a classroom scenario. In a static classroom with students sitting in a grid pattern, the mobile robot is able to serve up to 14 students per cycle while reducing the worst-case pathogen dosage by 20%, and with higher robustness compared to a static filter. The extent of robot protection is optimized by tuning the passing distance and speed, such that a robot is able to serve more people given a threshold of worst-case dosage a person can receive.