 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent humanoids in manufacturing to address worker shortage and skill gaps: Case of Tesla Optimus
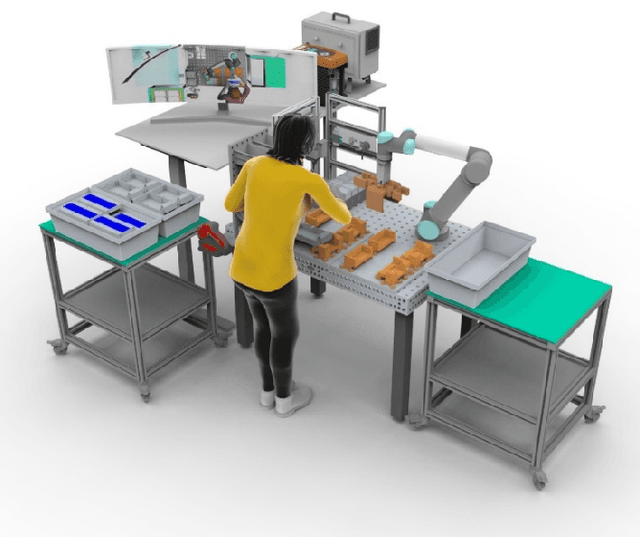
Apr 11, 2023Technological evolution in the field of robotics is emerging with major breakthroughs in recent years. This was especially fostered by revolutionary new software applications leading to humanoid robots. Humanoids are being envisioned for manufacturing applications to form human-robot teams. But their implication in manufacturing practices especially for industrial safety standards and lean manufacturing practices have been minimally addressed. Humanoids will also be competing with conventional robotic arms and effective methods to assess their return on investment are needed. To study the next generation of industrial automation, we used the case context of the Tesla humanoid robot. The company has recently unveiled its project on an intelligent humanoid robot named Optimus to achieve an increased level of manufacturing automation. This article proposes a framework to integrate humanoids for manufacturing automation and also presents the significance of safety standards of human-robot collaboration. A case of lean assembly cell for the manufacturing of an open-source medical ventilator was used for human-humanoid automation. Simulation results indicate that humanoids can increase the level of manufacturing automation. Managerial and research implications are presented.
Development of a mobile robot assistant for wind turbines manufacturing
Aug 09, 2022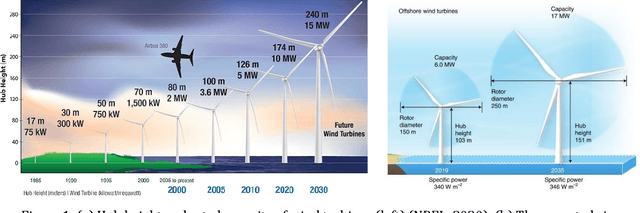
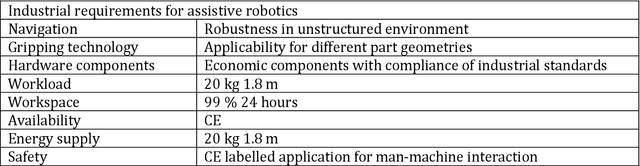
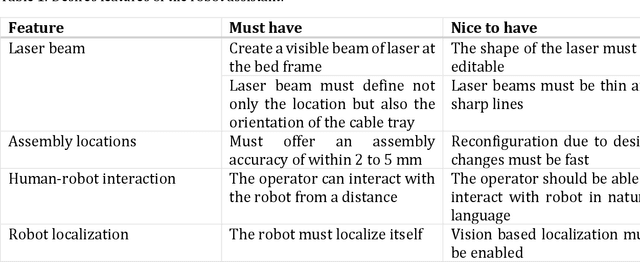
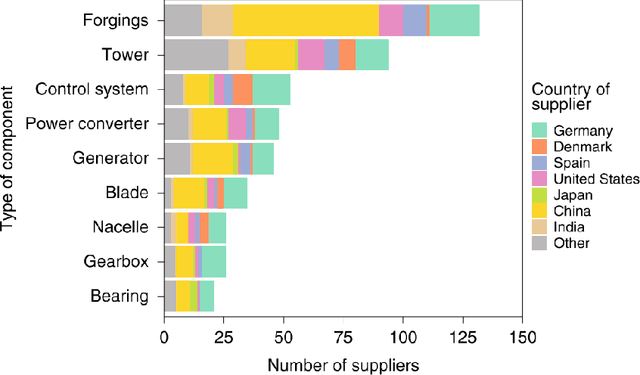
The thrust for increased rating capacity of wind turbines has resulted into larger generators, longer blades, and taller towers. Presently, up to 16 MW wind turbines are being offered by wind turbines manufacturers which is nearly a 60 percent increase in the design capacity over the last five years. Manufacturing of these turbines involves assembling of gigantic sized components. Due to the frequent design changes and the variety of tasks involved, conventional automation is not possible making it a labor-intensive activity. However the handling and assembling of large components are challenging the human capabilities. The article proposes the use of mobile robotic assistants for partial automation of wind turbines manufacturing. The robotic assistant can result into reducing production costs, and better work conditions. The article presents development of a robot assistant for human operators to effectively perform assembly of wind turbines. The case is from a leading wind turbines manufacturer. The developed system is also applicable to other cases of large component manufacturing involving intensive manual effort.
Robots and COVID-19: Challenges in integrating robots for collaborative automation
Jun 01, 2020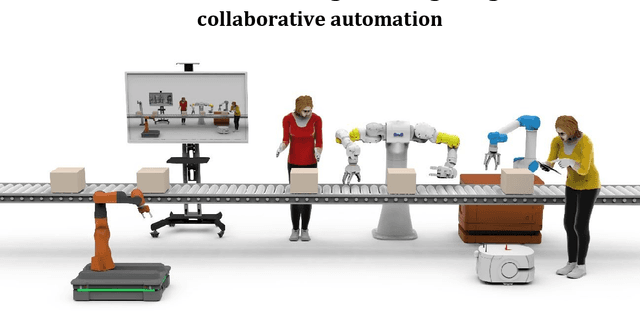
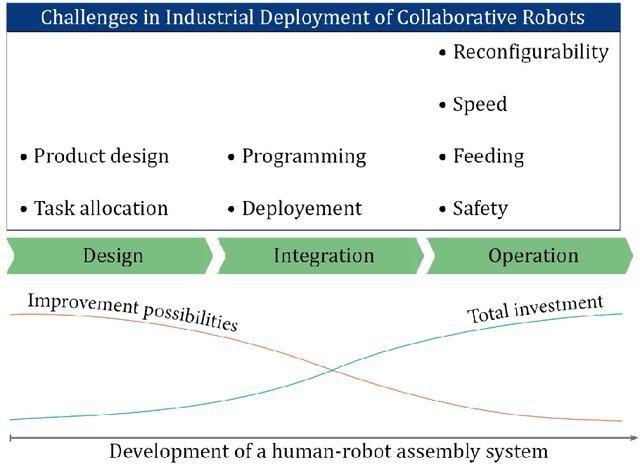
Objective: The status of human-robot collaboration for assembly applications is reviewed and key current challenges for the research community and practitioners are presented. Background: As the pandemic of COVID-19 started to surface the manufacturers went under pressure to address demand challenges. Social distancing measures made fewer people available to work. In such situations, robots were pointed at to support humans to address a shortage in supply. An important activity where humans are needed in a manufacturing value chain is assembly. HRC assembly systems are supposed to safeguard coexisting humans, perform a range of actions, and often need to be reconfigured to handle product variety. This requires them to be resilient and adaptable to various configurations during their operational life. Besides the potential advantages of using robots the challenges of using them in an industrial assembly are enormous. Methods: This mini-review summarizes the challenges of industrial deployment of collaborative robots for assembly applications. Applications: The documented challenges highlight the future research directions in human-robot interaction for industrial applications.
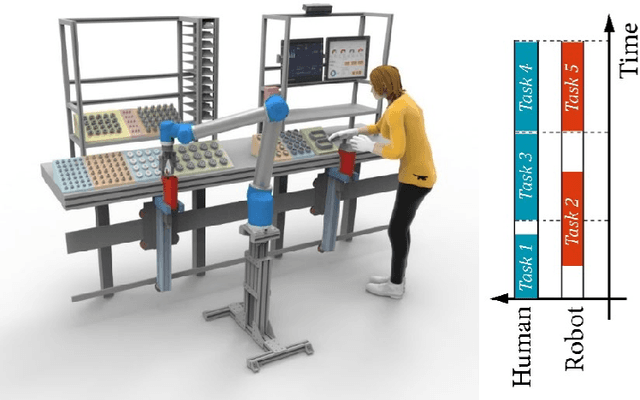
Reconfiguring and ramping-up ventilator production in the face of COVID-19: Can robots help?
Apr 15, 2020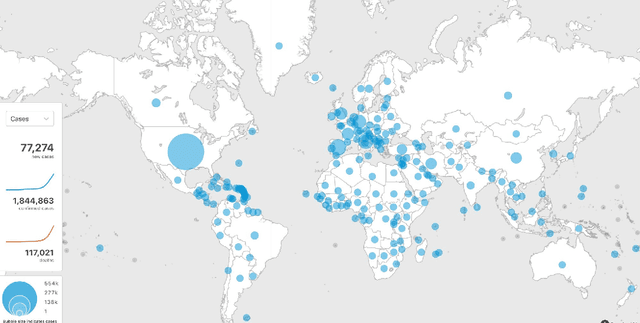

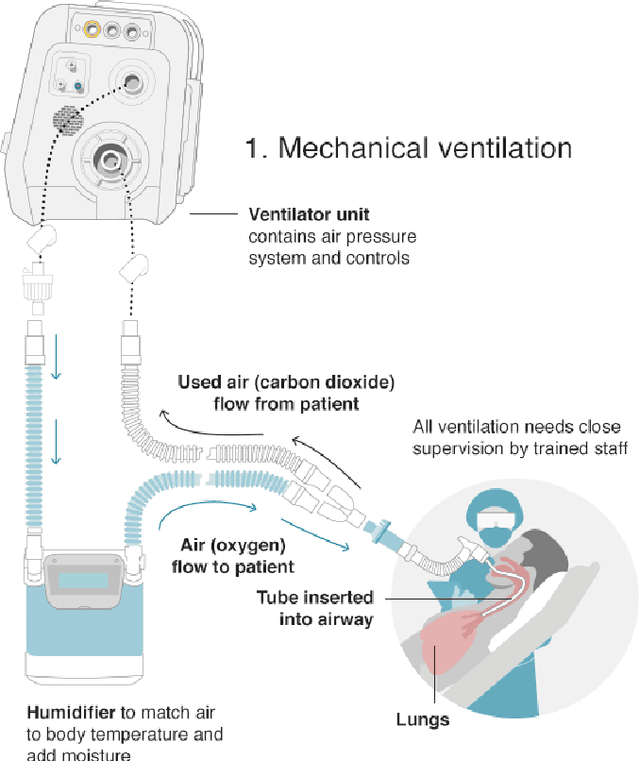

As the COVID-19 pandemic expands, the shortening of medical equipment is swelling. A key piece of equipment getting far-out attention has been ventilators. The difference between supply and demand is substantial to be handled with normal production techniques, especially under social distancing measures in place. The study explores the rationale of human-robot teams to ramp up production using advantages of both the ease of integration and maintaining social distancing. The paper presents a model for faster integration of collaborative robots and design guidelines for workstation. The scenarios are evaluated for an open source ventilator through continuous human-robot simulation and amplification of results in a discrete event simulation.