 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProposal-Conditioned Latent Diffusion for Closed-Loop Traffic Scenario Generation
Jun 25, 2026Closed-loop traffic simulation remains challenging because it must generate interactive multi-agent behaviors that are scene-consistent and controllable throughout rollout. Prior diffusion-based approaches achieve strong realism, but their computational cost can hinder deployment in time-constrained replanning loops for autonomous vehicle planning and simulation. We present a diffusion-based scenario generation framework conditioned on instance-centric scene context and multimodal proposal priors, with optional test-time guidance for shaping safety-critical behaviors. A compact action-latent representation and proposal-based initialization improve sampling efficiency and reduce per-step runtime without retraining. Experiments on the Waymo Open Motion Dataset demonstrate a favorable balance among realism, safety, and controllability across diverse interactive scenarios, while showing that test-time guidance enables systematic trade-offs among competing objectives.
Efficient Online Bayesian Inference for Neural Bandits
Dec 01, 2021

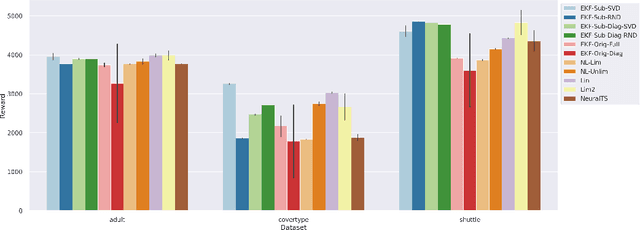
In this paper we present a new algorithm for online (sequential) inference in Bayesian neural networks, and show its suitability for tackling contextual bandit problems. The key idea is to combine the extended Kalman filter (which locally linearizes the likelihood function at each time step) with a (learned or random) low-dimensional affine subspace for the parameters; the use of a subspace enables us to scale our algorithm to models with $\sim 1M$ parameters. While most other neural bandit methods need to store the entire past dataset in order to avoid the problem of "catastrophic forgetting", our approach uses constant memory. This is possible because we represent uncertainty about all the parameters in the model, not just the final linear layer. We show good results on the "Deep Bayesian Bandit Showdown" benchmark, as well as MNIST and a recommender system.