 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Beacon Based Solution for Autonomous UUVs GNSS-Denied Stealthy Navigation
Jan 22, 2026Autonomous Unmanned Underwater Vehicles (UUVs) enable military and civilian covert operations in coastal areas without relying on support vessels or Global Navigation Satellite Systems (GNSS). Such operations are critical when surface access is not possible and stealthy navigation is required in restricted environments such as protected zones or dangerous areas under access ban. GNSS denied navigation is then essential to maintaining concealment as surfacing could expose UUVs to detection. To ensure a precise fleet positioning a constellation of beacons deployed by aerial or surface drones establish a synthetic landmark network that will guide the fleet of UUVs along an optimized path from the continental shelf to the goal on the shore. These beacons either submerged or floating emit acoustic signals for UUV localisation and navigation. A hierarchical planner generates an adaptive route for the drones executing primitive actions while continuously monitoring and replanning as needed to maintain trajectory accuracy.
HDDL 2.1: Towards Defining a Formalism and a Semantics for Temporal HTN Planning
Jun 12, 2023
Real world applications as in industry and robotics need modelling rich and diverse automated planning problems. Their resolution usually requires coordinated and concurrent action execution. In several cases, these problems are naturally decomposed in a hierarchical way and expressed by a Hierarchical Task Network (HTN) formalism. HDDL, a hierarchical extension of the Planning Domain Definition Language (PDDL), unlike PDDL 2.1 does not allow to represent planning problems with numerical and temporal constraints, which are essential for real world applications. We propose to fill the gap between HDDL and these operational needs and to extend HDDL by taking inspiration from PDDL 2.1 in order to express numerical and temporal expressions. This paper opens discussions on the semantics and the syntax needed for a future HDDL 2.1 extension.
* 5 pages, International Workshop of Hierarchical Planning (ICAPS), 2023
White Paper Machine Learning in Certified Systems
Mar 18, 2021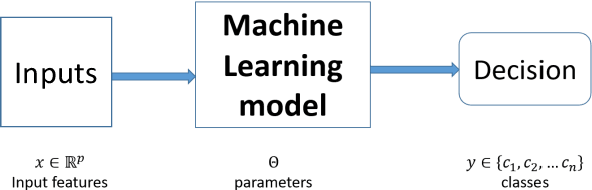
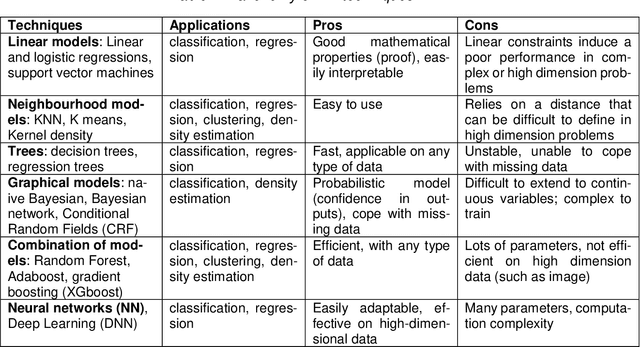

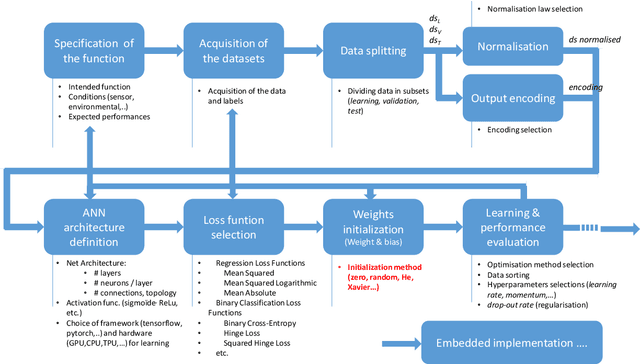
Machine Learning (ML) seems to be one of the most promising solution to automate partially or completely some of the complex tasks currently realized by humans, such as driving vehicles, recognizing voice, etc. It is also an opportunity to implement and embed new capabilities out of the reach of classical implementation techniques. However, ML techniques introduce new potential risks. Therefore, they have only been applied in systems where their benefits are considered worth the increase of risk. In practice, ML techniques raise multiple challenges that could prevent their use in systems submitted to certification constraints. But what are the actual challenges? Can they be overcome by selecting appropriate ML techniques, or by adopting new engineering or certification practices? These are some of the questions addressed by the ML Certification 3 Workgroup (WG) set-up by the Institut de Recherche Technologique Saint Exup\'ery de Toulouse (IRT), as part of the DEEL Project.