 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Preload Control of Cable-Driven Parallel Robots for Handling Task
Mar 28, 2024



This paper presents a method for dynamic adjustment of cable preloads based on the actuation redundancy of \acp{CDPR}, which allows increasing or decreasing the platform stiffness depending on task requirements. This is achieved by computing preload parameters with an extended nullspace formulation of the kinematics. The method facilitates the operator's ability to specify a defined preload within the operation space. The algorithms are implemented in a real-time environment, allowing for the use of optimization in hybrid position-force control. To validate the effectiveness of this approach, a simulation study is performed, and the obtained results are compared to existing methods. Furthermore, the method is investigated experimentally and compared with the conventional position-controlled operation of a cable robot. The results demonstrate the feasibility of adaptively adjusting cable preloads during platform motion and manipulation of additional objects.
Deep Reinforcement Learning using Cyclical Learning Rates
Jul 31, 2020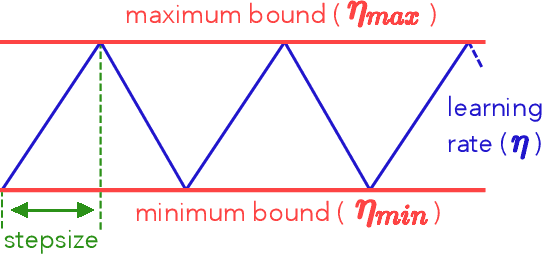
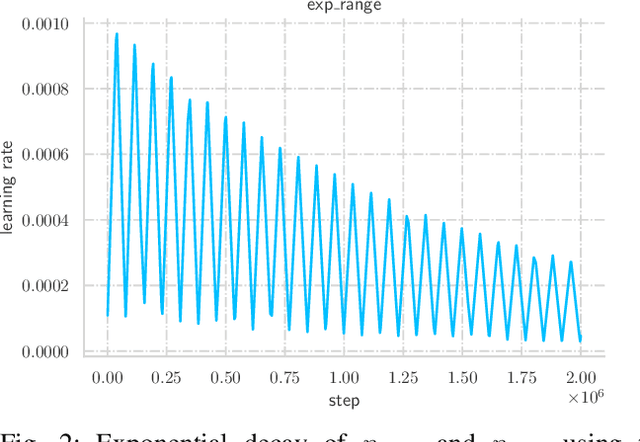
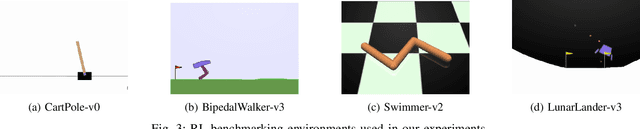
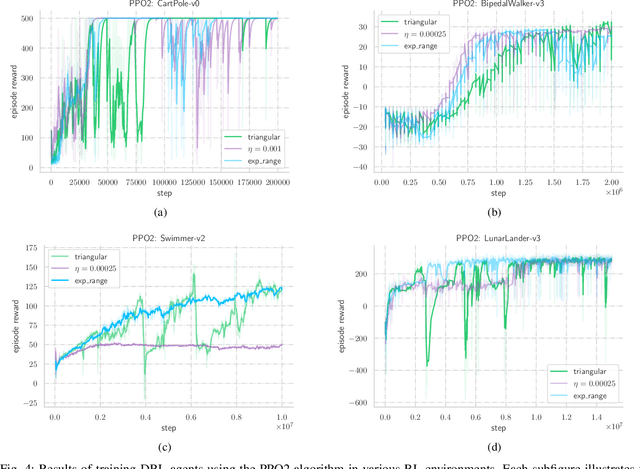
Deep Reinforcement Learning (DRL) methods often rely on the meticulous tuning of hyperparameters to successfully resolve problems. One of the most influential parameters in optimization procedures based on stochastic gradient descent (SGD) is the learning rate. We investigate cyclical learning and propose a method for defining a general cyclical learning rate for various DRL problems. In this paper we present a method for cyclical learning applied to complex DRL problems. Our experiments show that, utilizing cyclical learning achieves similar or even better results than highly tuned fixed learning rates. This paper presents the first application of cyclical learning rates in DRL settings and is a step towards overcoming manual hyperparameter tuning.
Reinforcement Learning Approach to Vibration Compensation for Dynamic Feed Drive Systems
Apr 14, 2020
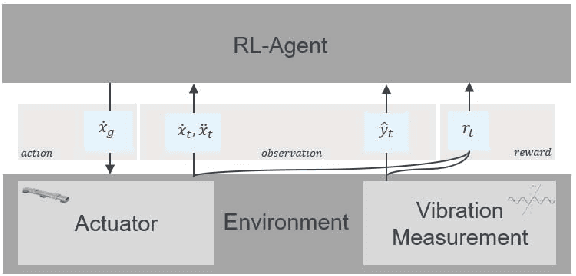
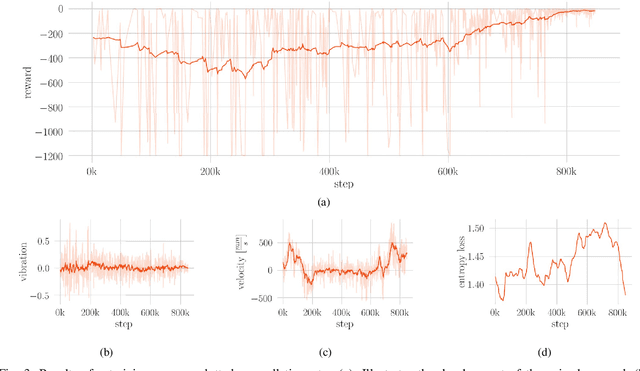

Vibration compensation is important for many domains. For the machine tool industry it translates to higher machining precision and longer component lifetime. Current methods for vibration damping have their shortcomings (e.g. need for accurate dynamic models). In this paper we present a reinforcement learning based approach to vibration compensation applied to a machine tool axis. The work describes the problem formulation, the solution, the implementation and experiments using industrial machine tool hardware and control system.