 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgecuVSLAM: CUDA accelerated visual odometry
Jun 04, 2025Accurate and robust pose estimation is a key requirement for any autonomous robot. We present cuVSLAM, a state-of-the-art solution for visual simultaneous localization and mapping, which can operate with a variety of visual-inertial sensor suites, including multiple RGB and depth cameras, and inertial measurement units. cuVSLAM supports operation with as few as one RGB camera to as many as 32 cameras, in arbitrary geometric configurations, thus supporting a wide range of robotic setups. cuVSLAM is specifically optimized using CUDA to deploy in real-time applications with minimal computational overhead on edge-computing devices such as the NVIDIA Jetson. We present the design and implementation of cuVSLAM, example use cases, and empirical results on several state-of-the-art benchmarks demonstrating the best-in-class performance of cuVSLAM.
Partial Hierarchical Pose Graph Optimization for SLAM
Oct 16, 2021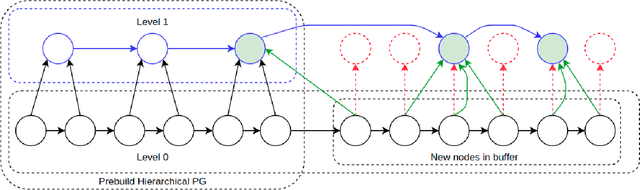
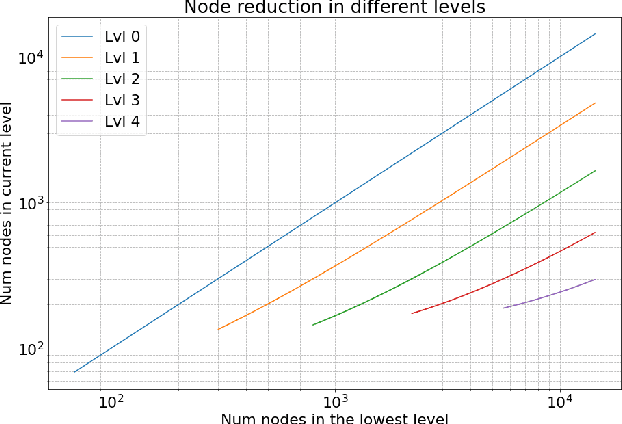
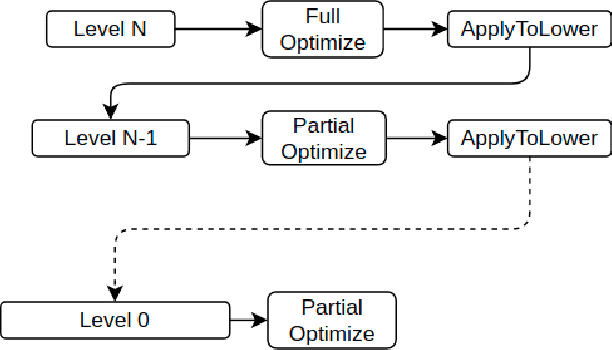
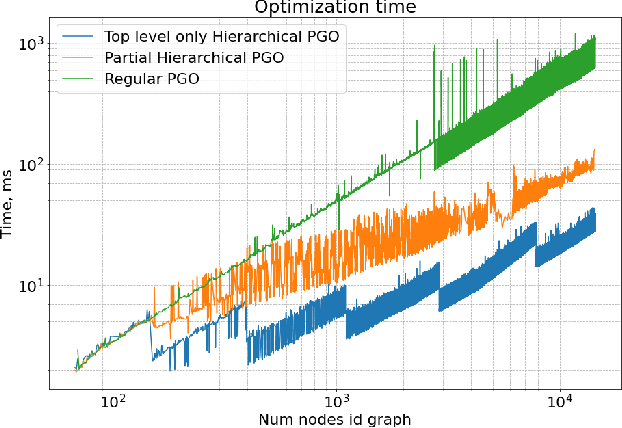
In this paper we consider a hierarchical pose graph optimization (HPGO) for Simultaneous Localization and Mapping (SLAM). We propose a fast incremental procedure for building hierarchy levels in pose graphs. We study the properties of this procedure and show that our solution delivers high execution speed, high reduction rate and good flexibility. We propose a way to do partial hierarchical optimization and compare it to other optimization modes. We show that given a comparatively large amount of poses, partial HPGO gives a 10x speed up comparing to the original optimization, not sacrificing the quality.