 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePassive Vibration Control of a 3-D Printer Gantry
May 25, 2025Improved additive manufacturing capabilities are vital for the future development and improvement of ubiquitous robotic systems. These machines can be integrated into existing robotic systems to allow manufacturing and repair of components, as well as fabrication of custom parts for the robots themselves. The fused filament fabrication (FFF) process is one of the most common and well-developed AM processes but suffers from the effects of vibration-induced position error, particularly as the printing speed is raised. This project adapted and expanded a dynamic model of an FFF gantry system to include a passive spring-mass-damper system controller attached to the extruder carriage and tuned using optimal parameters. A case study was conducted to demonstrate the effects and generate recommendations for implementation. This work is also valuable for other mechatronic systems which operate using an open-loop control system and which suffer from vibration, including numerous robotic systems, pick-and-place machines, positioners, and similar.
System-Level Development of a User-Integrated Semi-Autonomous Lawn Mowing System: Problem Overview, Basic Requirements, and Proposed Architecture
Jul 12, 2019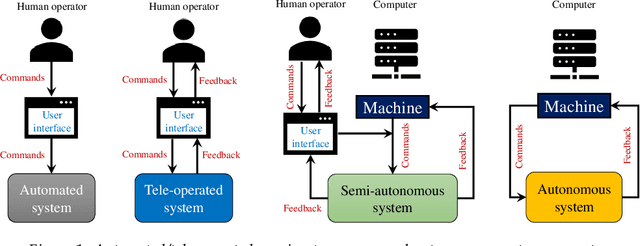
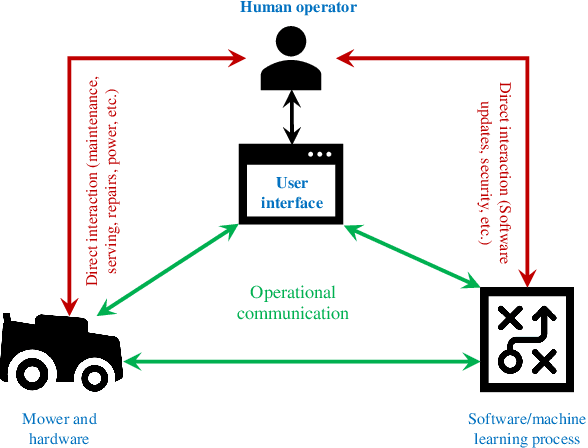
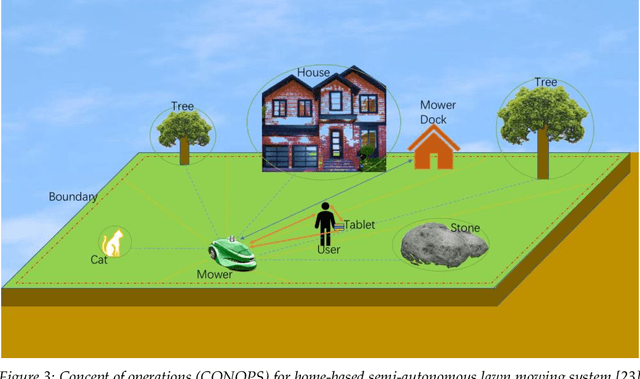
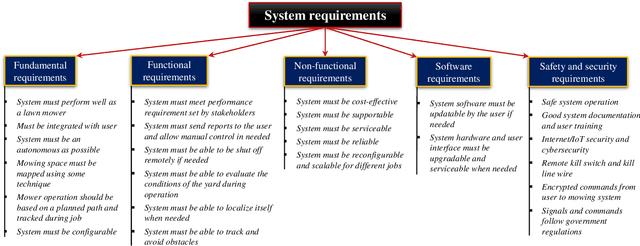
This concept paper outlines some recent efforts toward the design and development of user-integrated semi-autonomous home-sized lawn mowing systems from a systems engineering perspective. This is an important and emerging field of study within the robotics and systems engineering communities. The work presented includes a review of current progress on this problem, a discussion of the problem from a systems engineering perspective, a general system architecture developed by the authors, and a preliminary set of design requirements. This work is meant to provide a baseline and motivation for the further development and refinement of these systems within the systems engineering and robotics communities and is relevant to both academic and commercial research.