 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhich Reconstruction Model Should a Robot Use? Routing Image-to-3D Models for Cost-Aware Robotic Manipulation
Mar 29, 2026Robotic manipulation tasks require 3D mesh reconstructions of varying quality: dexterous manipulation demands fine-grained surface detail, while collision-free planning tolerates coarser representations. Multiple reconstruction methods offer different cost-quality tradeoffs, from Image-to-3D models - whose output quality depends heavily on the input viewpoint - to view-invariant methods such as structured light scanning. Querying all models is computationally prohibitive, motivating per-input model selection. We propose SCOUT, a novel routing framework that decouples reconstruction scores into two components: (1) the relative performance of viewpoint-dependent models, captured by a learned probability distribution, and (2) the overall image difficulty, captured by a scalar partition function estimate. As the learned network operates only over the viewpoint-dependent models, view-invariant pipelines can be added, removed, or reconfigured without retraining. SCOUT also supports arbitrary cost constraints at inference time, accommodating the multi-dimensional cost constraints common in robotics. We evaluate on the Google Scanned Objects, BigBIRD, and YCB datasets under multiple mesh quality metrics, demonstrating consistent improvements over routing baselines adapted from the LLM literature across various cost constraints. We further validate the framework through robotic grasping and dexterous manipulation experiments. We release the code and additional results on our website.
Wearable Audio and IMU Based Shot Detection in Racquet Sports
May 14, 2018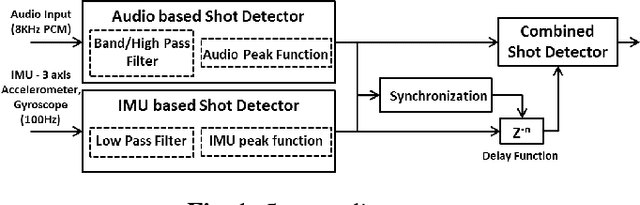
Wearables like smartwatches which are embedded with sensors and powerful processors, provide a strong platform for development of analytics solutions in sports domain. To analyze players' games, while motion sensor based shot detection has been extensively studied in sports like Tennis, Golf, Baseball; Table Tennis and Badminton are relatively less explored due to possible less intense hand motion during shots. In our paper, we propose a novel, computationally inexpensive and real-time system for shot detection in table tennis, based on fusion of Inertial Measurement Unit (IMU) and audio sensor data embedded in a wrist-worn wearable. The system builds upon our presented methodology for synchronizing IMU and audio sensor input in time using detected shots and achieves 95.6% accuracy. To our knowledge, it is the first fusion-based solution for sports analysis in wearables. Shot detectors for other racquet sports as well as further analytics to provide features like shot classification, rally analysis and recommendations, can easily be built over our proposed solution.