 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of a six wheel suspension and a three-axis linear actuation mechanism for a laser weeding robot
Dec 11, 2025Mobile robots are increasingly utilized in agriculture to automate labor-intensive tasks such as weeding, sowing, harvesting and soil analysis. Recently, agricultural robots have been developed to detect and remove weeds using mechanical tools or precise herbicide sprays. Mechanical weeding is inefficient over large fields, and herbicides harm the soil ecosystem. Laser weeding with mobile robots has emerged as a sustainable alternative in precision farming. In this paper, we present an autonomous weeding robot that uses controlled exposure to a low energy laser beam for weed removal. The proposed robot is six-wheeled with a novel double four-bar suspension for higher stability. The laser is guided towards the detected weeds by a three-dimensional linear actuation mechanism. Field tests have demonstrated the robot's capability to navigate agricultural terrains effectively by overcoming obstacles up to 15 cm in height. At an optimal speed of 42.5 cm/s, the robot achieves a weed detection rate of 86.2\% and operating time of 87 seconds per meter. The laser actuation mechanism maintains a minimal mean positional error of 1.54 mm, combined with a high hit rate of 97\%, ensuring effective and accurate weed removal. This combination of speed, accuracy, and efficiency highlights the robot's potential for significantly enhancing precision farming practices.
Construction Inspection through Spatial Database
Apr 21, 2017

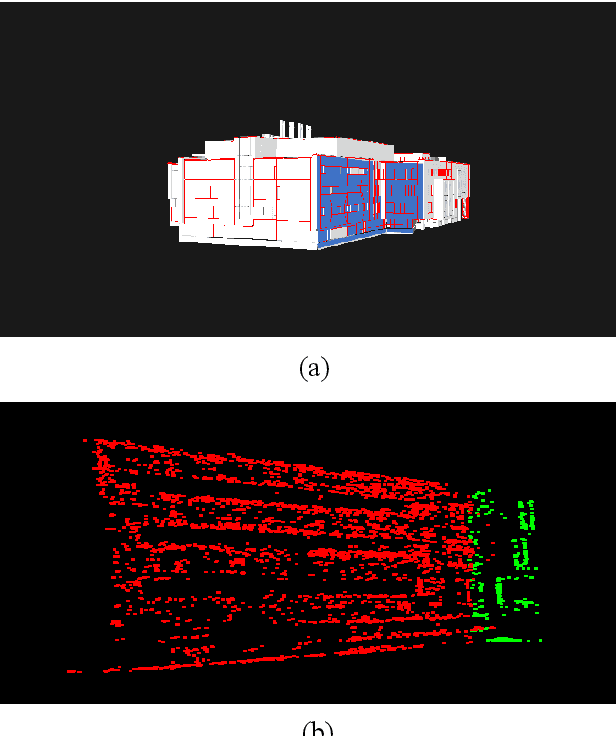

This paper presents a novel pipeline for development of an efficient set of tools for extracting information from the video of a structure, captured by an Unmanned Aircraft System (UAS) to produce as-built documentation to aid inspection of large multi-storied building during construction. Our system uses the output from a Simultaneous Localization and Mapping system and a 3D CAD model of the structure in order to construct a spatial database to store images into the 3D CAD model space. This allows the user to perform a spatial query for images through spatial indexing into the 3D CAD model space. The image returned by the spatial query is used to extract metric information. The spatial database is also used to generate a 3D textured model which provides a visual as-built documentation.