 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThrough-life Monitoring of Resource-constrained Systems and Fleets
Jan 03, 2023A Digital Twin (DT) is a simulation of a physical system that provides information to make decisions that add economic, social or commercial value. The behaviour of a physical system changes over time, a DT must therefore be continually updated with data from the physical systems to reflect its changing behaviour. For resource-constrained systems, updating a DT is non-trivial because of challenges such as on-board learning and the off-board data transfer. This paper presents a framework for updating data-driven DTs of resource-constrained systems geared towards system health monitoring. The proposed solution consists of: (1) an on-board system running a light-weight DT allowing the prioritisation and parsimonious transfer of data generated by the physical system; and (2) off-board robust updating of the DT and detection of anomalous behaviours. Two case studies are considered using a production gas turbine engine system to demonstrate the digital representation accuracy for real-world, time-varying physical systems.
In-flight Novelty Detection with Convolutional Neural Networks
Dec 07, 2021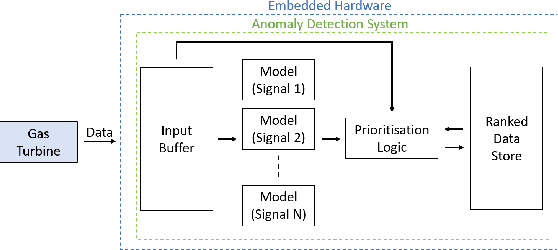
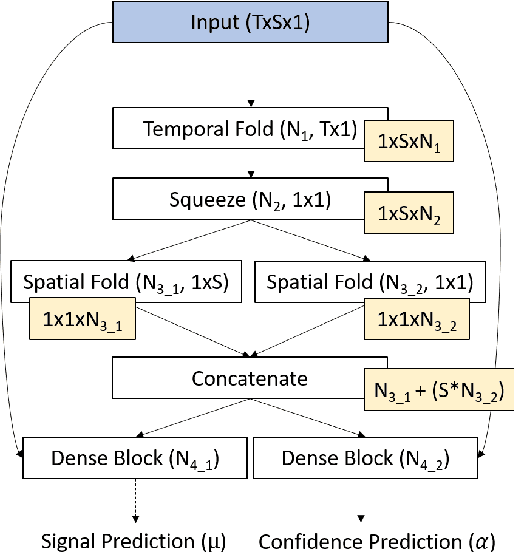
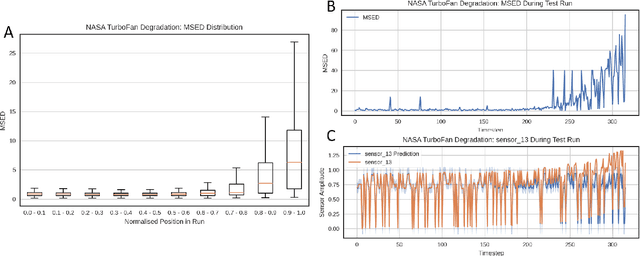
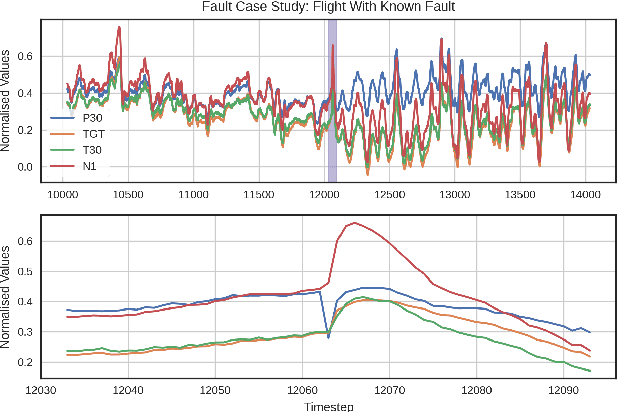
Gas turbine engines are complex machines that typically generate a vast amount of data, and require careful monitoring to allow for cost-effective preventative maintenance. In aerospace applications, returning all measured data to ground is prohibitively expensive, often causing useful, high value, data to be discarded. The ability to detect, prioritise, and return useful data in real-time is therefore vital. This paper proposes that system output measurements, described by a convolutional neural network model of normality, are prioritised in real-time for the attention of preventative maintenance decision makers. Due to the complexity of gas turbine engine time-varying behaviours, deriving accurate physical models is difficult, and often leads to models with low prediction accuracy and incompatibility with real-time execution. Data-driven modelling is a desirable alternative producing high accuracy, asset specific models without the need for derivation from first principles. We present a data-driven system for online detection and prioritisation of anomalous data. Biased data assessment deriving from novel operating conditions is avoided by uncertainty management integrated into the deep neural predictive model. Testing is performed on real and synthetic data, showing sensitivity to both real and synthetic faults. The system is capable of running in real-time on low-power embedded hardware and is currently in deployment on the Rolls-Royce Pearl 15 engine flight trials.
A temporal-to-spatial deep convolutional neural network for classification of hand movements from multichannel electromyography data
Aug 19, 2020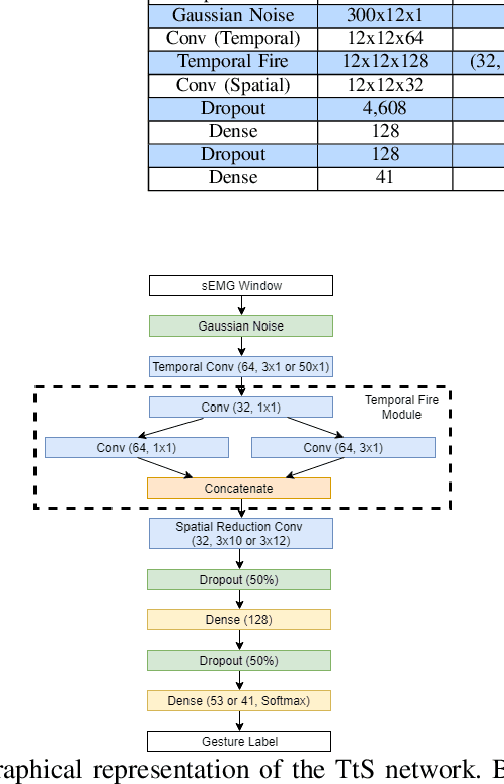
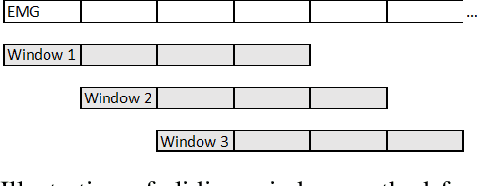
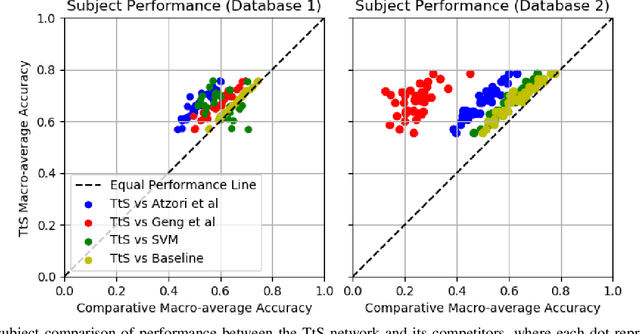
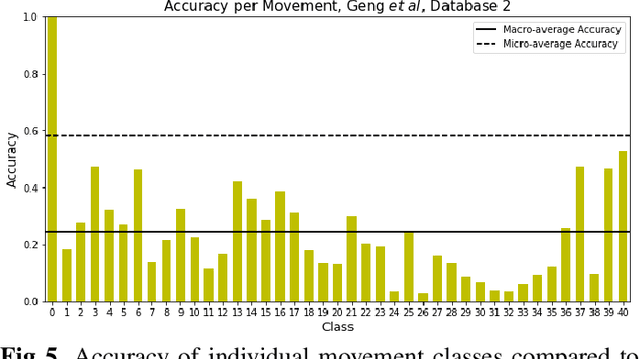
Deep convolutional neural networks (CNNs) are appealing for the purpose of classification of hand movements from surface electromyography (sEMG) data because they have the ability to perform automated person-specific feature extraction from raw data. In this paper, we make the novel contribution of proposing and evaluating a design for the early processing layers in the deep CNN for multichannel sEMG. Specifically, we propose a novel temporal-to-spatial (TtS) CNN architecture, where the first layer performs convolution separately on each sEMG channel to extract temporal features. This is motivated by the idea that sEMG signals in each channel are mediated by one or a small subset of muscles, whose temporal activation patterns are associated with the signature features of a gesture. The temporal layer captures these signature features for each channel separately, which are then spatially mixed in successive layers to recognise a specific gesture. A practical advantage is that this approach also makes the CNN simple to design for different sample rates. We use NinaPro database 1 (27 subjects and 52 movements + rest), sampled at 100 Hz, and database 2 (40 subjects and 40 movements + rest), sampled at 2 kHz, to evaluate our proposed CNN design. We benchmark against a feature-based support vector machine (SVM) classifier, two CNNs from the literature, and an additional standard design of CNN. We find that our novel TtS CNN design achieves 66.6% per-class accuracy on database 1, and 67.8% on database 2, and that the TtS CNN outperforms all other compared classifiers using a statistical hypothesis test at the 2% significance level.
Compact Deep Neural Networks for Computationally Efficient Gesture Classification From Electromyography Signals
Jul 03, 2018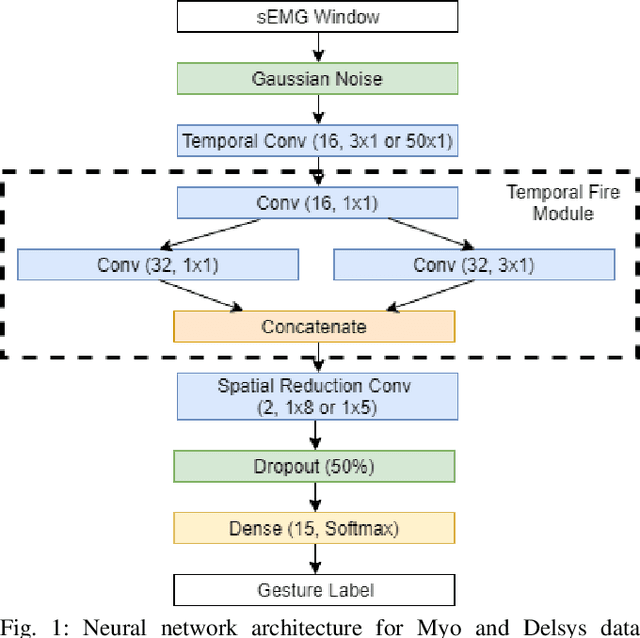
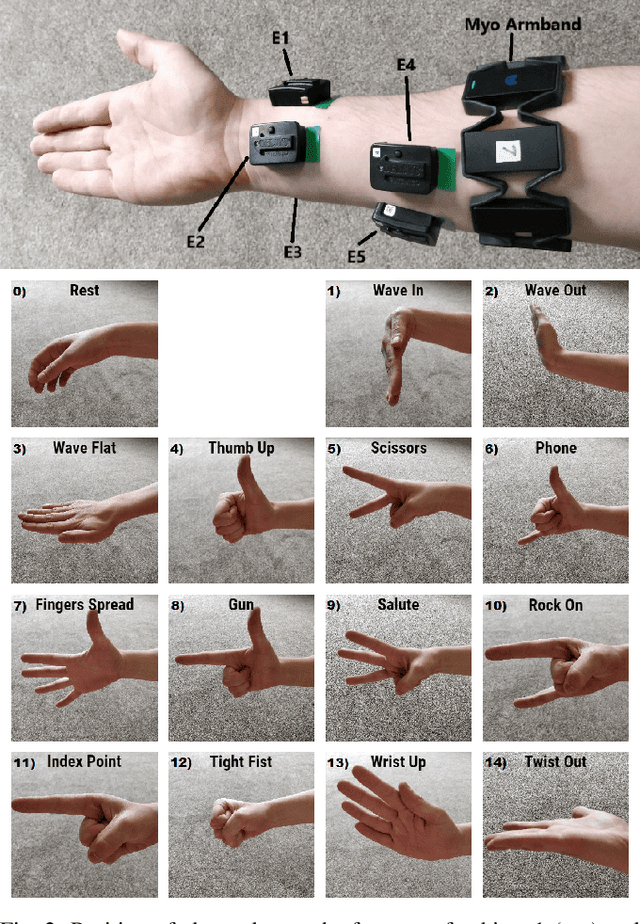
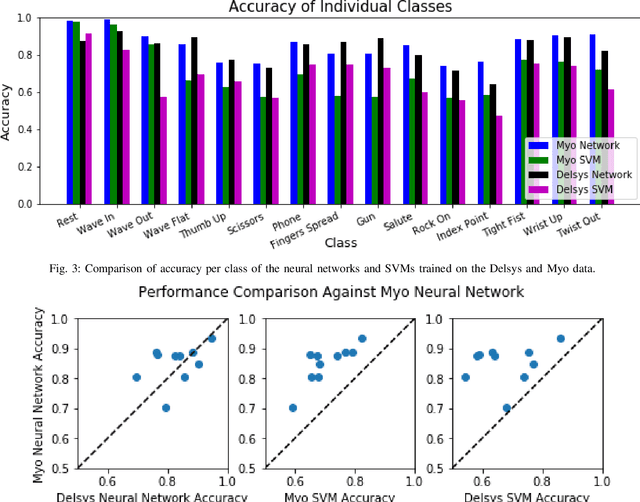
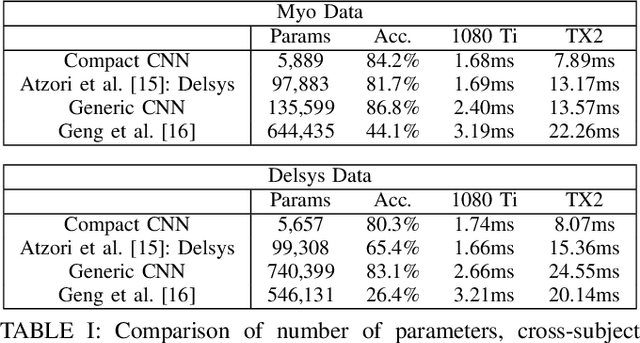
Machine learning classifiers using surface electromyography are important for human-machine interfacing and device control. Conventional classifiers such as support vector machines (SVMs) use manually extracted features based on e.g. wavelets. These features tend to be fixed and non-person specific, which is a key limitation due to high person-to-person variability of myography signals. Deep neural networks, by contrast, can automatically extract person specific features - an important advantage. However, deep neural networks typically have the drawback of large numbers of parameters, requiring large training data sets and powerful hardware not suited to embedded systems. This paper solves these problems by introducing a compact deep neural network architecture that is much smaller than existing counterparts. The performance of the compact deep net is benchmarked against an SVM and compared to other contemporary architectures across 10 human subjects, comparing Myo and Delsys Trigno electrode sets. The accuracy of the compact deep net was found to be 84.2 +/- 0.06% versus 70.5 +/- 0.07% for the SVM on the Myo, and 80.3+/- 0.07% versus 67.8 +/- 0.09% for the Delsys system, demonstrating the superior effectiveness of the proposed compact network, which had just 5,889 parameters - orders of magnitude less than some contemporary alternatives in this domain while maintaining better performance.