 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA time-weighted metric for sets of trajectories to assess multi-object tracking algorithms
Oct 26, 2021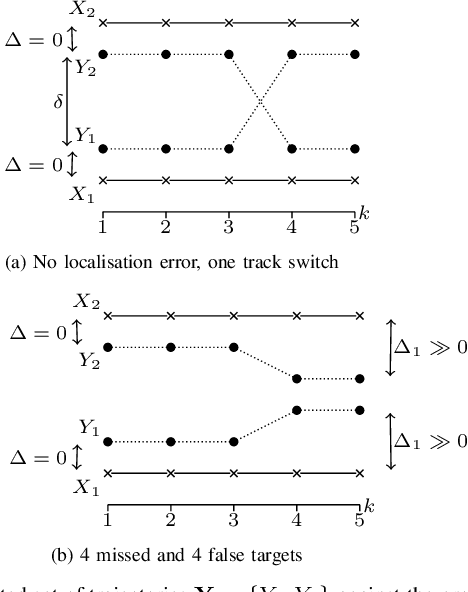
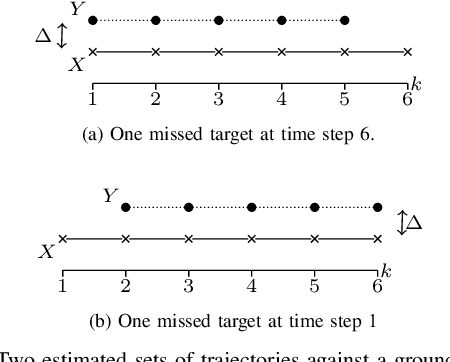
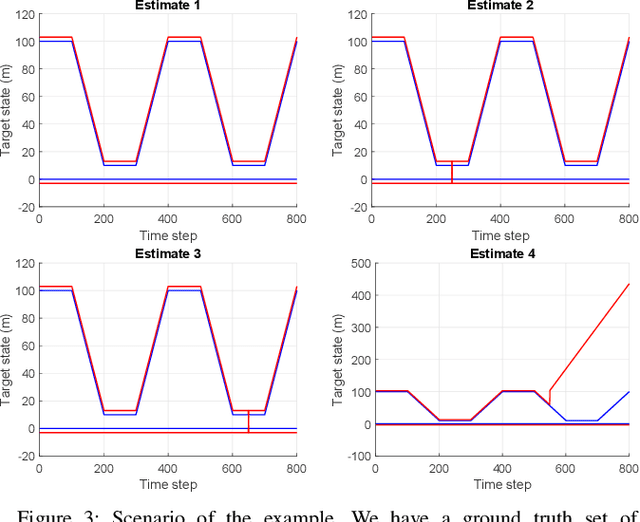
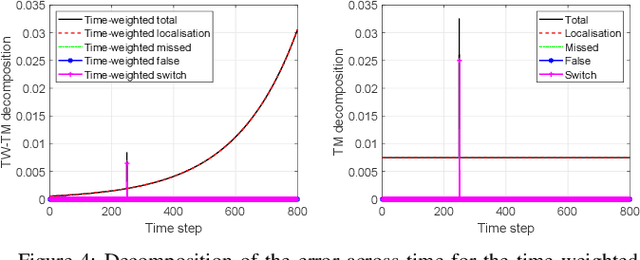
This paper proposes a metric for sets of trajectories to evaluate multi-object tracking algorithms that includes time-weighted costs for localisation errors of properly detected targets, for false targets, missed targets and track switches. The proposed metric extends the metric in [1] by including weights to the costs associated to different time steps. The time-weighted costs increase the flexibility of the metric [1] to fit more applications and user preferences. We first introduce a metric based on multi-dimensional assignments, and then its linear programming relaxation, which is computable in polynomial time and is also a metric. The metrics can also be extended to metrics on random finite sets of trajectories to evaluate and rank algorithms across different scenarios, each with a ground truth set of trajectories.
* Matlab code available at https://github.com/Agarciafernandez/MTT (Trajectory metric folder)
Generalized optimal sub-pattern assignment metric
Sep 12, 2018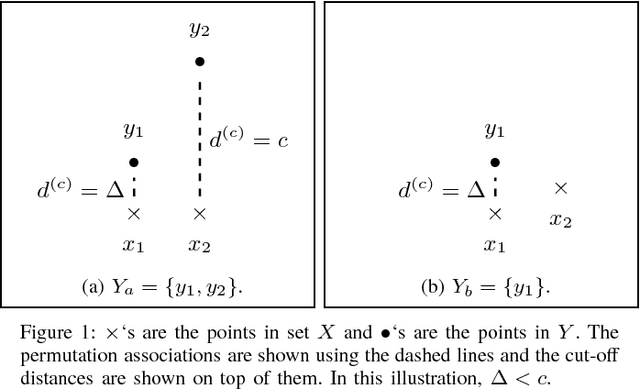
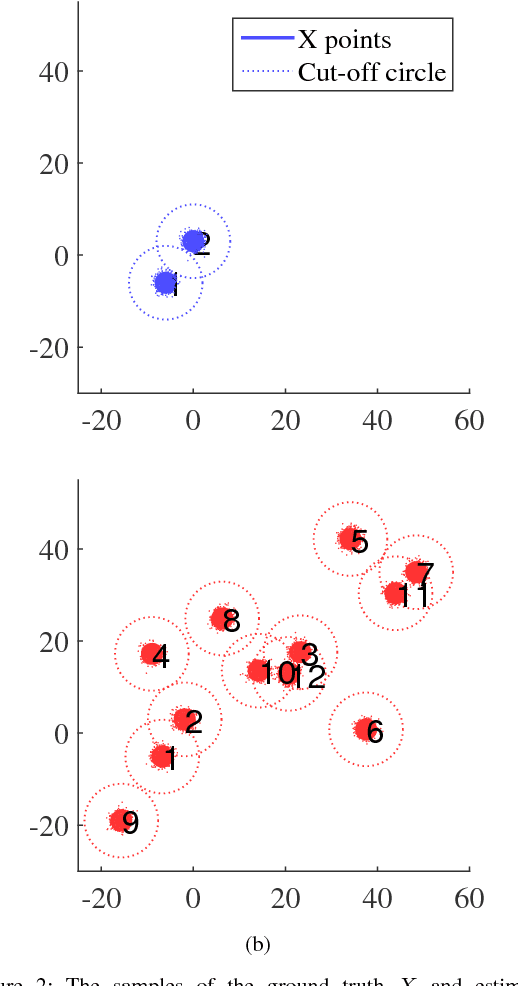
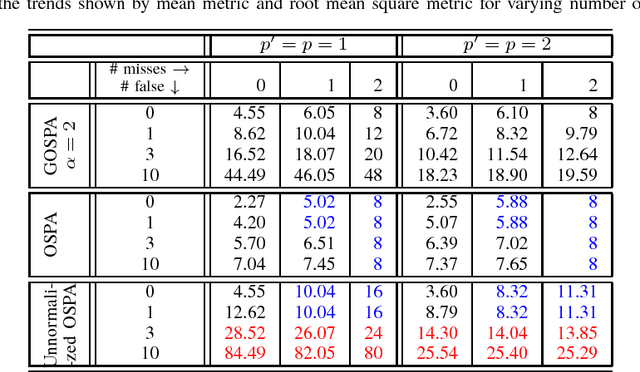
This paper presents the generalized optimal sub-pattern assignment (GOSPA) metric on the space of finite sets of targets. Compared to the well-established optimal sub-pattern assignment (OSPA) metric, GOSPA is unnormalized as a function of the cardinality and it penalizes cardinality errors differently, which enables us to express it as an optimisation over assignments instead of permutations. An important consequence of this is that GOSPA allows us to penalize localization errors for detected targets and the errors due to missed and false targets, as indicated by traditional multiple target tracking (MTT) performance measures, in a sound manner. In addition, we extend the GOSPA metric to the space of random finite sets, which is important to evaluate MTT algorithms via simulations in a rigorous way.
* The paper received the Jean Pierre Le Cadre best paper award at the 20th International Conference on Information Fusion, July 2017. A Matlab implementation of the proposed GOSPA metric is available in https://github.com/abusajana/GOSPA Also visit https://youtu.be/M79GTTytvCM for a 15-min presentation about the paper
A metric on the space of finite sets of trajectories for evaluation of multi-target tracking algorithms
Feb 22, 2017
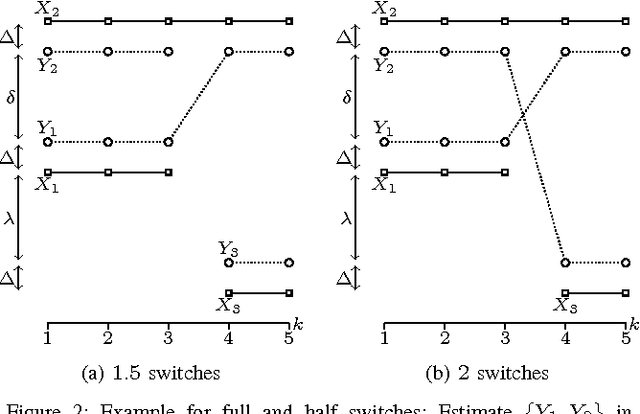
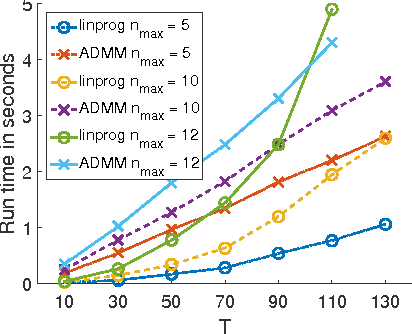
In this paper, we propose a metric on the space of finite sets of trajectories for assessing multi-target tracking algorithms in a mathematically sound way. The metric can be used, e.g., to compare estimates from algorithms with the ground truth. It includes intuitive costs associated to localization, missed and false targets and track switches. The metric computation is based on multi-dimensional assignments, which is an NP hard problem. Therefore, we also propose a lower bound for the metric, which is also a metric for sets of trajectories and is computable in polynomial time using linear programming (LP). The LP metric can be implemented using alternating direction method of multipliers such that the complexity scales linearly with the length of the trajectories.