 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnisotropic Template Ansätze for Robust Positive Invariance under State-Dependent Uncertainty
Jun 14, 2026We establish sufficient conditions for robust positive invariance under state- and input-dependent disturbances with anisotropic covariance structure. The proposed ansatz maps a fixed ellipsoidal template through a GP-derived positive-definite matrix field, subsuming scalar homothetic scaling while retaining finite graph-based verification. The resulting LMI conditions couple the learned field to Schur-stable dynamics; an isotropic fallback with inflation factor $r=1/(1-γ_{\mathrm{cl}})$ proves admissibility. During each learning epoch the field is frozen, so online tube evaluation is one GP covariance query and a small matrix square root, with no online set iteration or LMI solve. Quadrotor simulations show a $195\times$ reduction in 3D velocity-tube volume and a $2.1{\times}10^5$ reduction in the joint 7D velocity-control subspace relative to a non-adaptive homothetic baseline. This extended version adds full proofs, a separated offline/online complexity analysis, and controller-sweep, contraction, and projection-area studies.
Learning-Based Shrinking Disturbance-Invariant Tubes for State- and Input-Dependent Uncertainty
Jan 16, 2026We develop a learning-based framework for constructing shrinking disturbance-invariant tubes under state- and input-dependent uncertainty, intended as a building block for tube Model Predictive Control (MPC), and certify safety via a lifted, isotone (order-preserving) fixed-point map. Gaussian Process (GP) posteriors become $(1-α)$ credible ellipsoids, then polytopic outer sets for deterministic set operations. A two-time-scale scheme separates learning epochs, where these polytopes are frozen, from an inner, outside-in iteration that converges to a compact fixed point $Z^\star\!\subseteq\!\mathcal G$; its state projection is RPI for the plant. As data accumulate, disturbance polytopes tighten, and the associated tubes nest monotonically, resolving the circular dependence between the set to be verified and the disturbance model while preserving hard constraints. A double-integrator study illustrates shrinking tube cross-sections in data-rich regions while maintaining invariance.
Physics-Constrained Denoising Autoencoders for Data-Scarce Wildfire UAV Sensing
Jan 16, 2026Wildfire monitoring requires high-resolution atmospheric measurements, yet low-cost sensors on Unmanned Aerial Vehicles (UAVs) exhibit baseline drift, cross-sensitivity, and response lag that corrupt concentration estimates. Traditional deep learning denoising approaches demand large datasets impractical to obtain from limited UAV flight campaigns. We present PC$^2$DAE, a physics-informed denoising autoencoder that addresses data scarcity by embedding physical constraints directly into the network architecture. Non-negative concentration estimates are enforced via softplus activations and physically plausible temporal smoothing, ensuring outputs are physically admissible by construction rather than relying on loss function penalties. The architecture employs hierarchical decoder heads for Black Carbon, Gas, and CO$_2$ sensor families, with two variants: PC$^2$DAE-Lean (21k parameters) for edge deployment and PC$^2$DAE-Wide (204k parameters) for offline processing. We evaluate on 7,894 synchronized 1 Hz samples collected from UAV flights during prescribed burns in Saskatchewan, Canada (approximately 2.2 hours of flight data), two orders of magnitude below typical deep learning requirements. PC$^2$DAE-Lean achieves 67.3\% smoothness improvement and 90.7\% high-frequency noise reduction with zero physics violations. Five baselines (LSTM-AE, U-Net, Transformer, CBDAE, DeSpaWN) produce 15--23\% negative outputs. The lean variant outperforms wide (+5.6\% smoothness), suggesting reduced capacity with strong inductive bias prevents overfitting in data-scarce regimes. Training completes in under 65 seconds on consumer hardware.
Wildfire Autonomous Response and Prediction Using Cellular Automata (WARP-CA)
Jul 02, 2024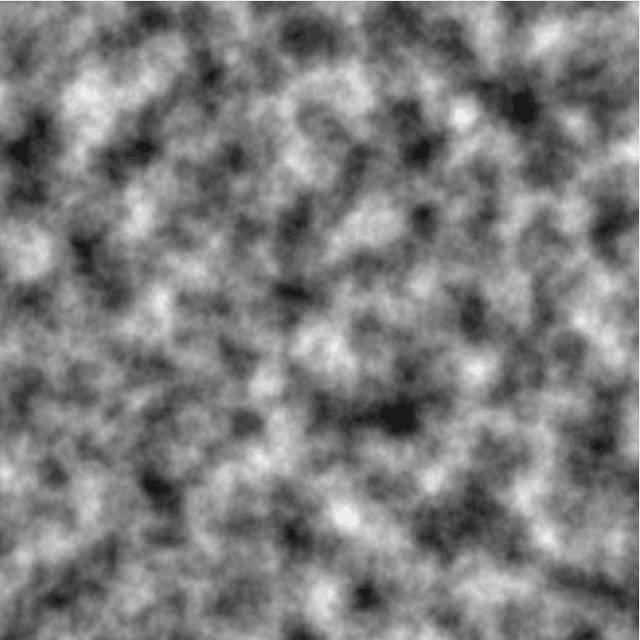

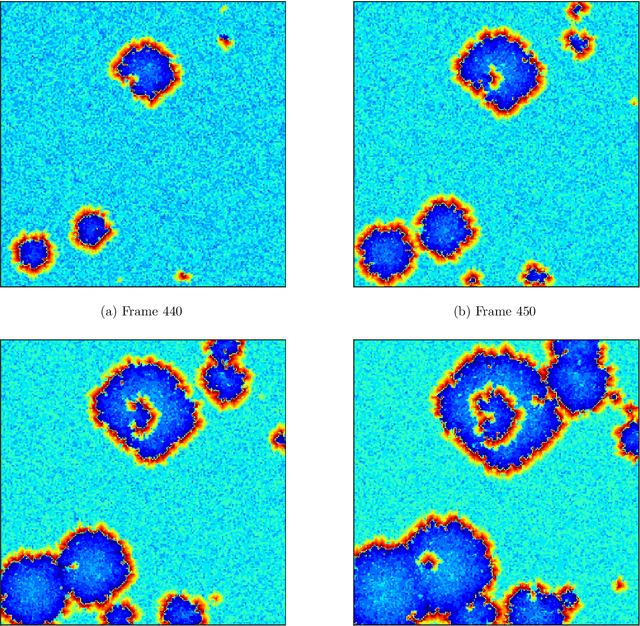
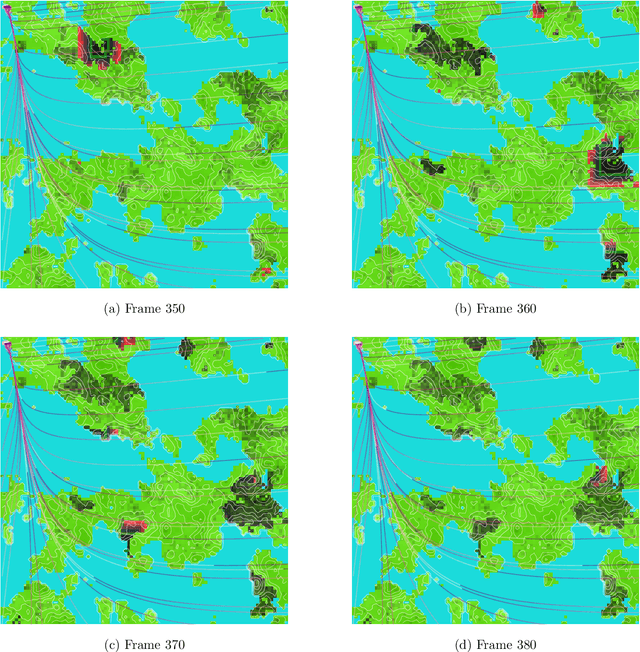
Wildfires pose a severe challenge to ecosystems and human settlements, exacerbated by climate change and environmental factors. Traditional wildfire modeling, while useful, often fails to adapt to the rapid dynamics of such events. This report introduces the (Wildfire Autonomous Response and Prediction Using Cellular Automata) WARP-CA model, a novel approach that integrates terrain generation using Perlin noise with the dynamism of Cellular Automata (CA) to simulate wildfire spread. We explore the potential of Multi-Agent Reinforcement Learning (MARL) to manage wildfires by simulating autonomous agents, such as UAVs and UGVs, within a collaborative framework. Our methodology combines world simulation techniques and investigates emergent behaviors in MARL, focusing on efficient wildfire suppression and considering critical environmental factors like wind patterns and terrain features.