 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShield-Loco: Shielding Locomotion Policies with Predictive Safety Filtering
Jun 05, 2026Reinforcement learning (RL) policies enable dynamic legged locomotion but lack mechanisms to avoid violations of safety constraints that are absent during training. Large-scale offline safe learning is impractical for covering all edge cases. Existing safety frameworks either rely on reduced-order models that cannot reason about whole-body behaviors or require conservative recovery controllers that degrade task performance. We propose a predictive safety filter that post-hoc filters the nominal contact locations fed to the RL policy. When a collision is predicted, a sampling-based optimizer asynchronously searches for safer contact sequences using a full-physics model, while a learned value function bootstraps long-horizon returns. Our three algorithmic components (geometric projection of sampled contacts, momentum-augmented updates, and replica-exchange) make the optimization tractable in a discontinuous contact landscape. We validate the filter on a quadruped robot in dense, cluttered environments, both in simulation and in the real world, showing substantial reductions in safety violations with minimal deviation from the nominal input.
Differentially Private Maximal Information Coefficients
Jun 21, 2022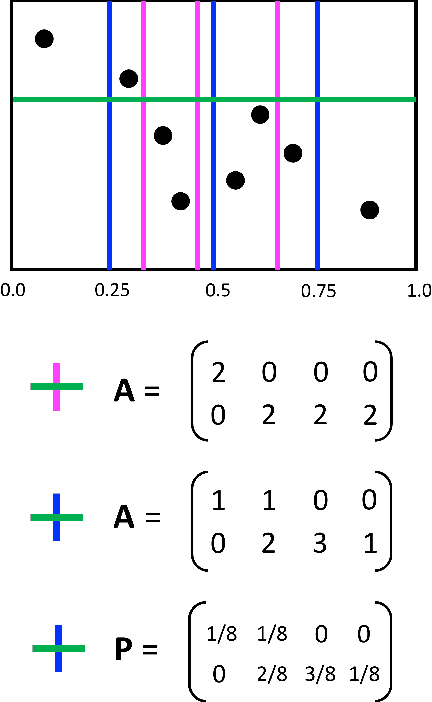
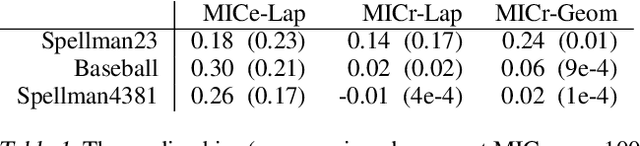
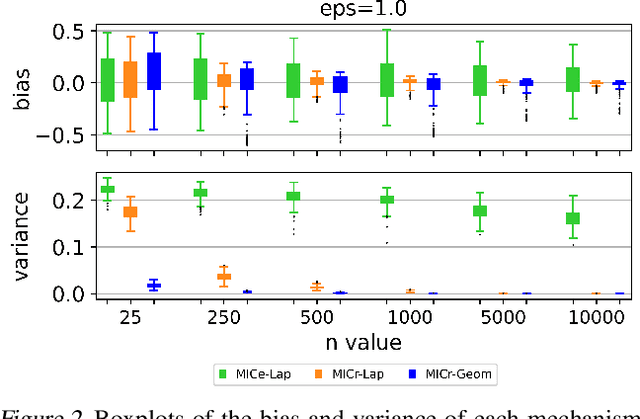
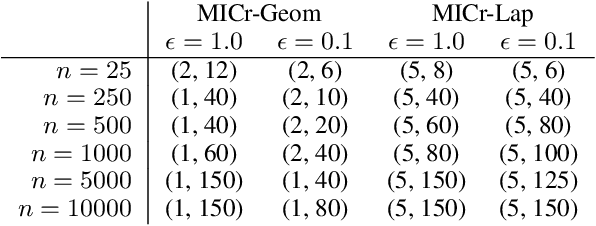
The Maximal Information Coefficient (MIC) is a powerful statistic to identify dependencies between variables. However, it may be applied to sensitive data, and publishing it could leak private information. As a solution, we present algorithms to approximate MIC in a way that provides differential privacy. We show that the natural application of the classic Laplace mechanism yields insufficient accuracy. We therefore introduce the MICr statistic, which is a new MIC approximation that is more compatible with differential privacy. We prove MICr is a consistent estimator for MIC, and we provide two differentially private versions of it. We perform experiments on a variety of real and synthetic datasets. The results show that the private MICr statistics significantly outperform direct application of the Laplace mechanism. Moreover, experiments on real-world datasets show accuracy that is usable when the sample size is at least moderately large.
Consistency of the Maximal Information Coefficient Estimator
Jul 08, 2021The Maximal Information Coefficient (MIC) of Reshef et al. (Science, 2011) is a statistic for measuring dependence between variable pairs in large datasets. In this note, we prove that MIC is a consistent estimator of the corresponding population statistic MIC$_*$. This corrects an error in an argument of Reshef et al. (JMLR, 2016), which we describe.