 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAMBER: Aerial deployable gripping crawler with compliant microspine for canopy manipulation
Dec 08, 2025



This paper presents an aerially deployable crawler designed for adaptive locomotion and manipulation within tree canopies. The system combines compliant microspine-based tracks, a dual-track rotary gripper, and an elastic tail, enabling secure attachment and stable traversal across branches of varying curvature and inclination. Experiments demonstrate reliable gripping up to 90 degrees of body roll and inclination, while effective climbing on branches inclined up to 67.5 degrees, achieving a maximum speed of 0.55 body lengths per second on horizontal branches. The compliant tracks allow yaw steering of up to 10 degrees, enhancing maneuverability on irregular surfaces. Power measurements show efficient operation with a dimensionless cost of transport over an order of magnitude lower than typical hovering power consumption in aerial robots. Integrated within a drone-tether deployment system, the crawler provides a robust, low-power platform for environmental sampling and in-canopy sensing, bridging the gap between aerial and surface-based ecological robotics.
DLScanner: A parameter space scanner package assisted by deep learning methods
Dec 27, 2024



In this paper, we introduce a scanner package enhanced by deep learning (DL) techniques. The proposed package addresses two significant challenges associated with previously developed DL-based methods: slow convergence in high-dimensional scans and the limited generalization of the DL network when mapping random points to the target space. To tackle the first issue, we utilize a similarity learning network that maps sampled points into a representation space. In this space, in-target points are grouped together while out-target points are effectively pushed apart. This approach enhances the scan convergence by refining the representation of sampled points. The second challenge is mitigated by integrating a dynamic sampling strategy. Specifically, we employ a VEGAS mapping to adaptively suggest new points for the DL network while also improving the mapping when more points are collected. Our proposed framework demonstrates substantial gains in both performance and efficiency compared to other scanning methods.
Exploration of Parameter Spaces Assisted by Machine Learning
Aug 04, 2022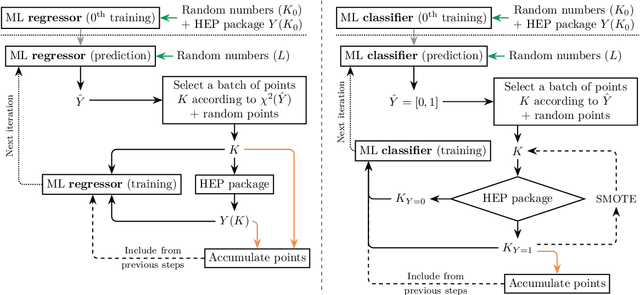
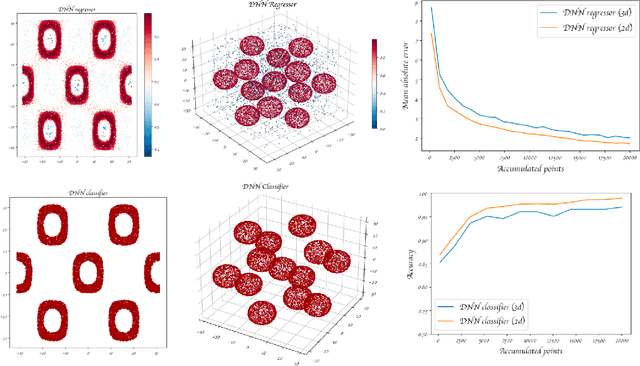
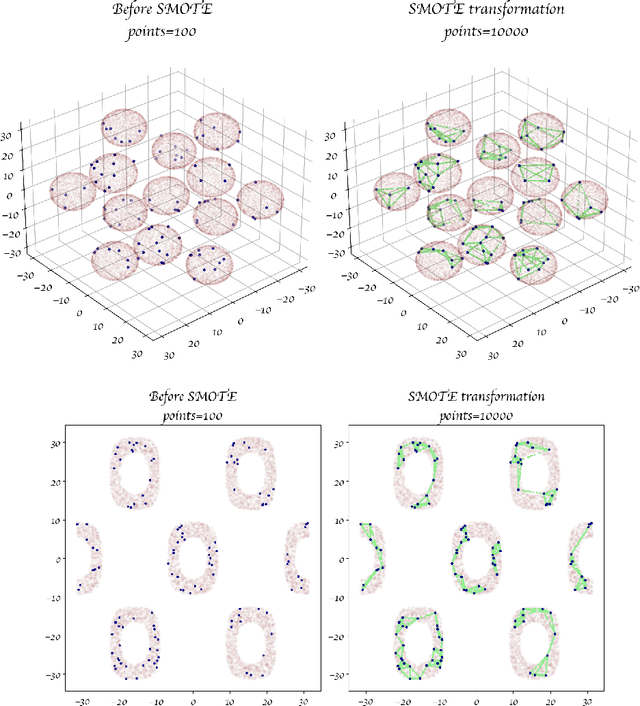
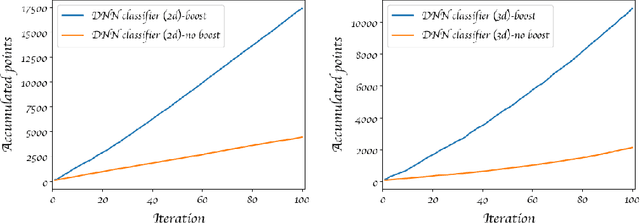
We showcase a variety of functions and classes that implement sampling procedures with improved exploration of the parameter space assisted by machine learning. Special attention is paid to setting sane defaults with the objective that adjustments required by different problems remain minimal. This collection of routines can be employed for different types of analysis, from finding bounds on the parameter space to accumulating samples in areas of interest. In particular, we discuss two methods assisted by incorporating different machine learning models: regression and classification. We show that a machine learning classifier can provide higher efficiency for exploring the parameter space. Also, we introduce a boosting technique to improve the slow convergence at the start of the process. The use of these routines is better explained with the help of a few examples that illustrate the type of results one can obtain. We also include examples of the code used to obtain the examples as well as descriptions of the adjustments that can be made to adapt the calculation to other problems. We finalize by showing the impact of these techniques when exploring the parameter space of the two Higgs doublet model that matches the measured Higgs Boson signal strength. The code used for this paper and instructions on how to use it are available on the web.