 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSviro
Papers and Code
Multitask Network for Joint Object Detection, Semantic Segmentation and Human Pose Estimation in Vehicle Occupancy Monitoring
May 03, 2022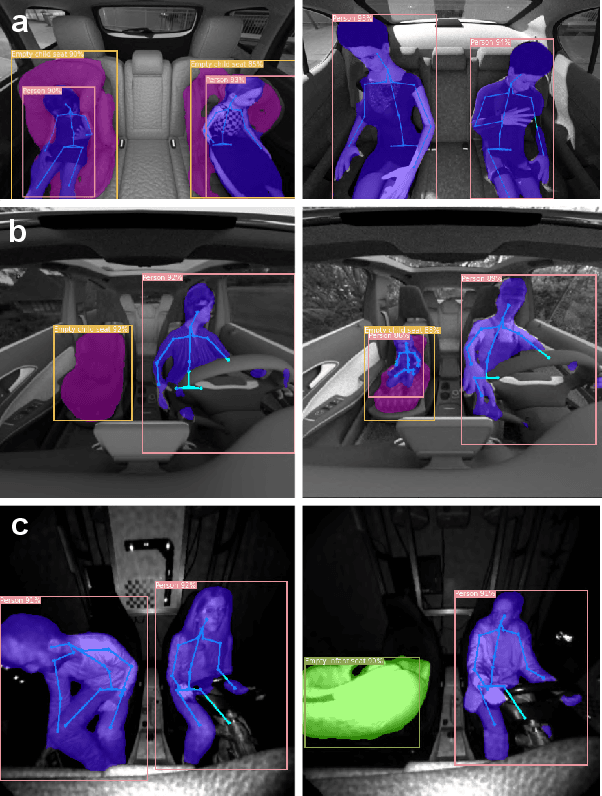
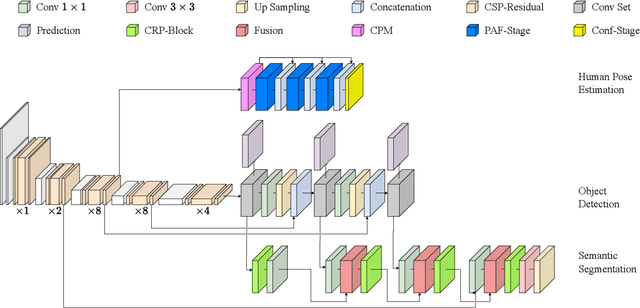
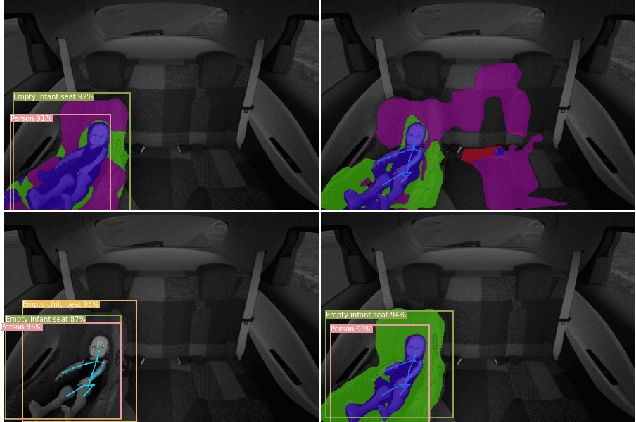

In order to ensure safe autonomous driving, precise information about the conditions in and around the vehicle must be available. Accordingly, the monitoring of occupants and objects inside the vehicle is crucial. In the state-of-the-art, single or multiple deep neural networks are used for either object recognition, semantic segmentation, or human pose estimation. In contrast, we propose our Multitask Detection, Segmentation and Pose Estimation Network (MDSP) -- the first multitask network solving all these three tasks jointly in the area of occupancy monitoring. Due to the shared architecture, memory and computing costs can be saved while achieving higher accuracy. Furthermore, our architecture allows a flexible combination of the three mentioned tasks during a simple end-to-end training. We perform comprehensive evaluations on the public datasets SVIRO and TiCaM in order to demonstrate the superior performance.
Autoencoder Based Inter-Vehicle Generalization for In-Cabin Occupant Classification
May 07, 2021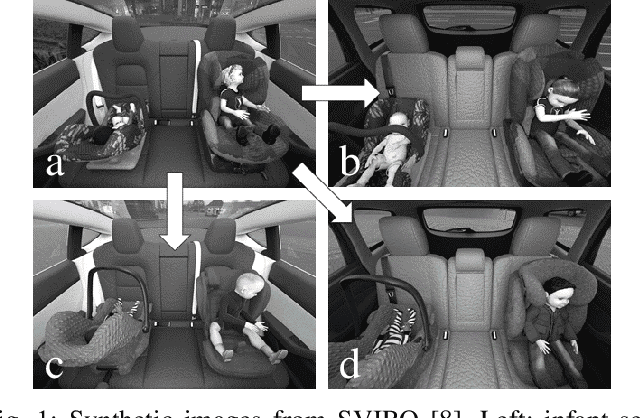
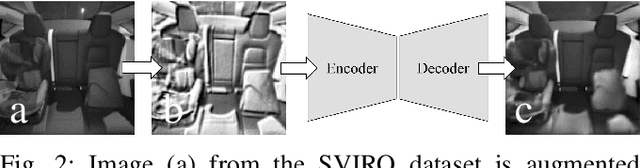
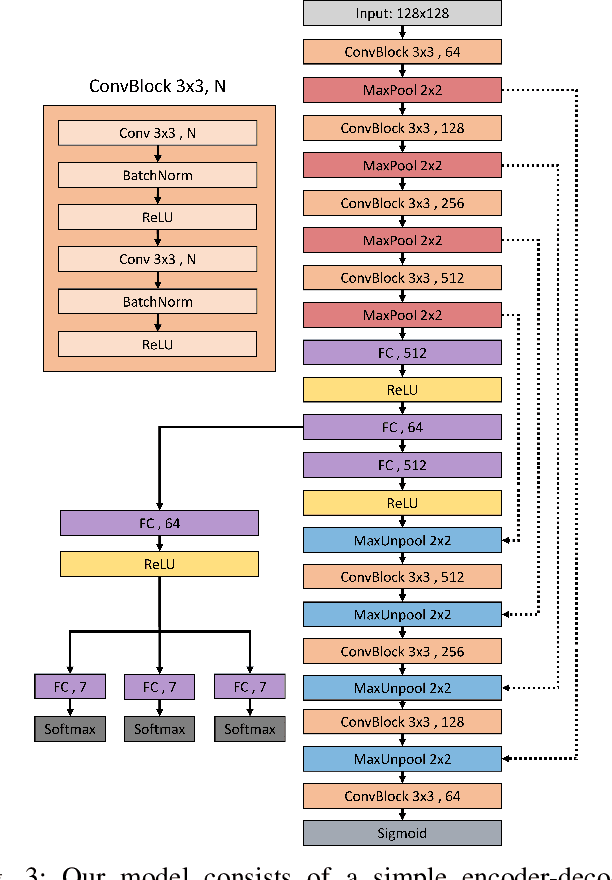
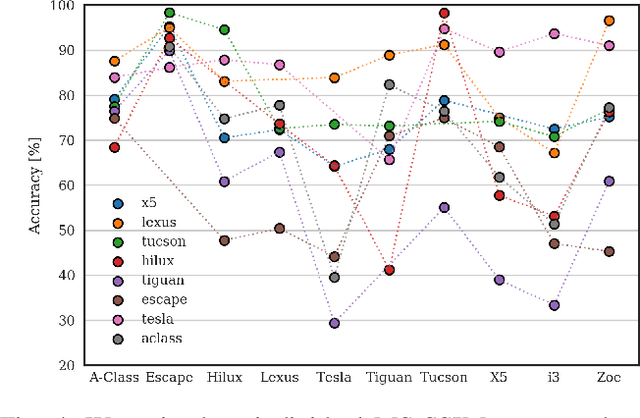
Common domain shift problem formulations consider the integration of multiple source domains, or the target domain during training. Regarding the generalization of machine learning models between different car interiors, we formulate the criterion of training in a single vehicle: without access to the target distribution of the vehicle the model would be deployed to, neither with access to multiple vehicles during training. We performed an investigation on the SVIRO dataset for occupant classification on the rear bench and propose an autoencoder based approach to improve the transferability. The autoencoder is on par with commonly used classification models when trained from scratch and sometimes out-performs models pre-trained on a large amount of data. Moreover, the autoencoder can transform images from unknown vehicles into the vehicle it was trained on. These results are corroborated by an evaluation on real infrared images from two vehicle interiors.
SVIRO: Synthetic Vehicle Interior Rear Seat Occupancy Dataset and Benchmark
Jan 10, 2020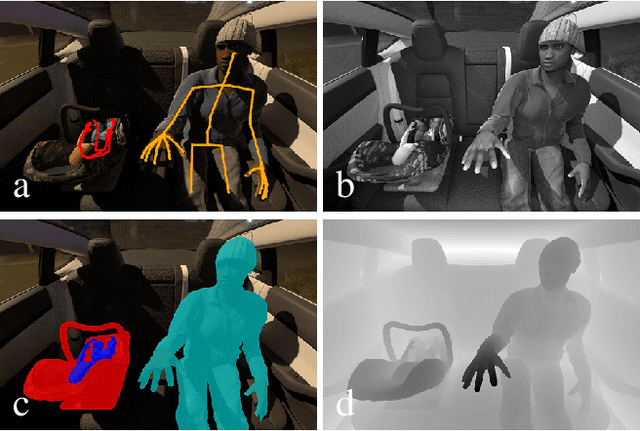
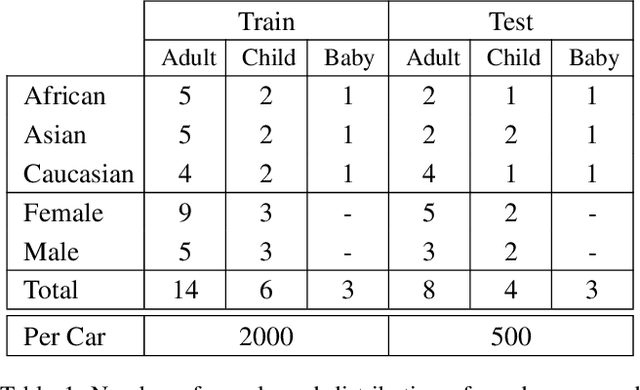
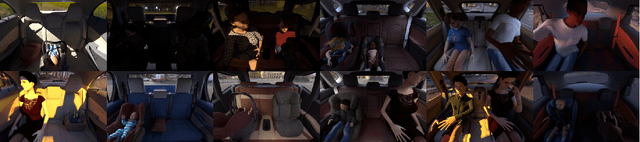

We release SVIRO, a synthetic dataset for sceneries in the passenger compartment of ten different vehicles, in order to analyze machine learning-based approaches for their generalization capacities and reliability when trained on a limited number of variations (e.g. identical backgrounds and textures, few instances per class). This is in contrast to the intrinsically high variability of common benchmark datasets, which focus on improving the state-of-the-art of general tasks. Our dataset contains bounding boxes for object detection, instance segmentation masks, keypoints for pose estimation and depth images for each synthetic scenery as well as images for each individual seat for classification. The advantage of our use-case is twofold: The proximity to a realistic application to benchmark new approaches under novel circumstances while reducing the complexity to a more tractable environment, such that applications and theoretical questions can be tested on a more challenging dataset as toy problems. The data and evaluation server are available under https://sviro.kl.dfki.de.