 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTightly-coupled Fusion of Global Positional Measurements in Optimization-based Visual-Inertial Odometry
Paper and Code
Mar 09, 2020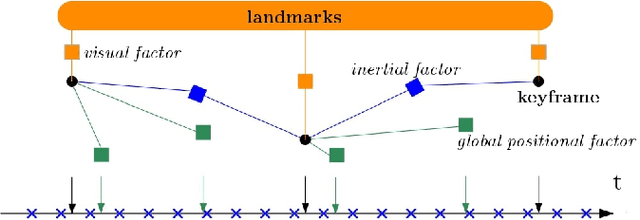
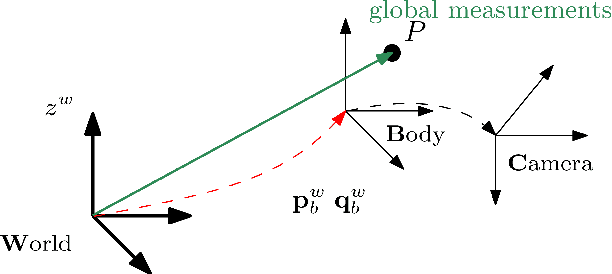
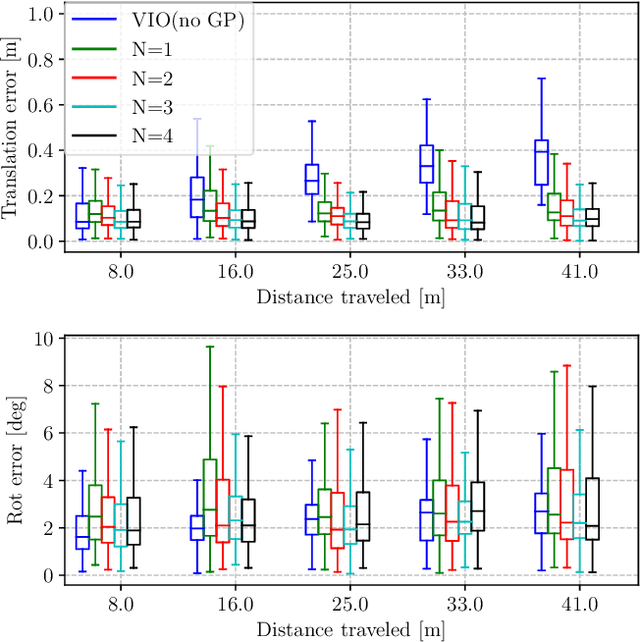
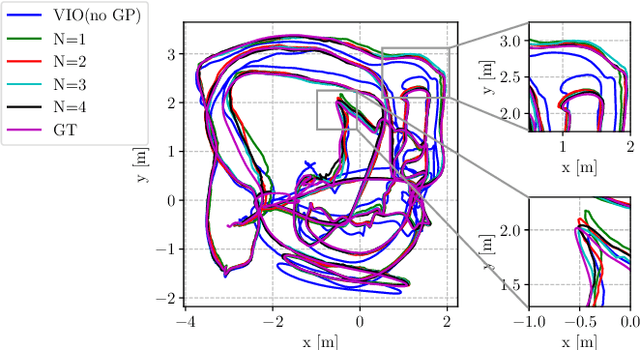
Motivated by the goal of achieving robust, drift-free pose estimation in long-term autonomous navigation, in this work we propose a methodology to fuse global positional information with visual and inertial measurements in a tightly-coupled nonlinear-optimization-based estimator. Differently from previous works, which are loosely-coupled, the use of a tightly-coupled approach allows exploiting the correlations amongst all the measurements. A sliding window of the most recent system states is estimated by minimizing a cost function that includes visual re-projection errors, relative inertial errors, and global positional residuals. We use IMU preintegration to formulate the inertial residuals and leverage the outcome of such algorithm to efficiently compute the global position residuals. The experimental results show that the proposed method achieves accurate and globally consistent estimates, with negligible increase of the optimization computational cost. Our method consistently outperforms the loosely-coupled fusion approach. The mean position error is reduced up to 50% with respect to the loosely-coupled approach in outdoor Unmanned Aerial Vehicle (UAV) flights, where the global position information is given by noisy GPS measurements. To the best of our knowledge, this is the first work where global positional measurements are tightly fused in an optimization-based visual-inertial odometry algorithm, leveraging the IMU preintegration method to define the global positional factors.