 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-calibration of a differential wheeled robot using only a gyroscope and a distance sensor
Paper and Code
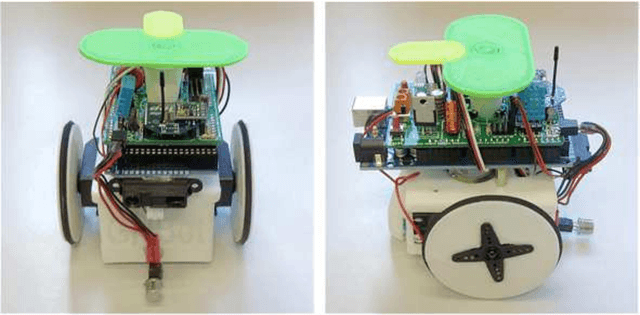
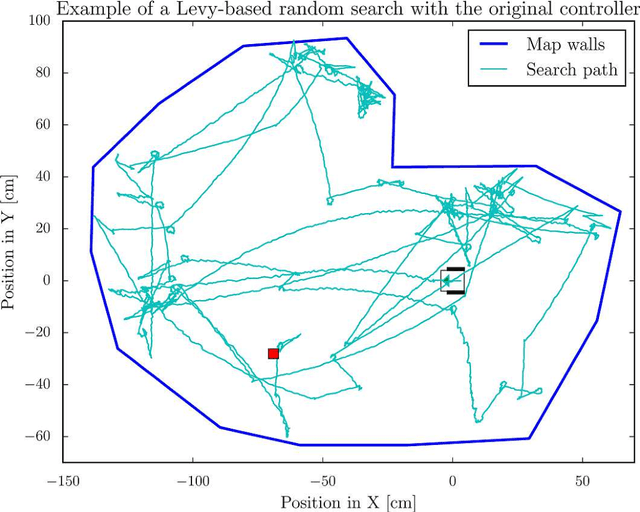
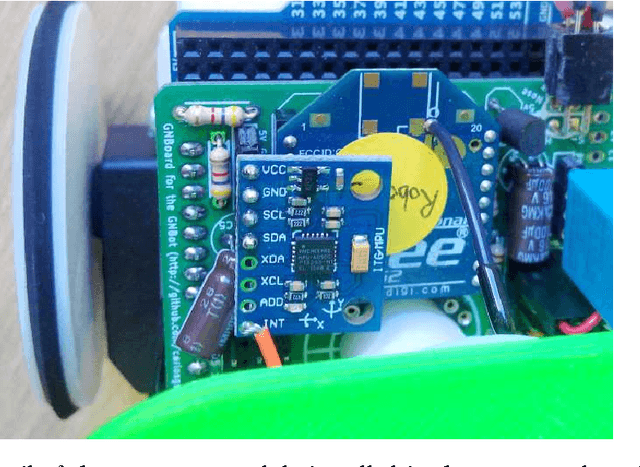
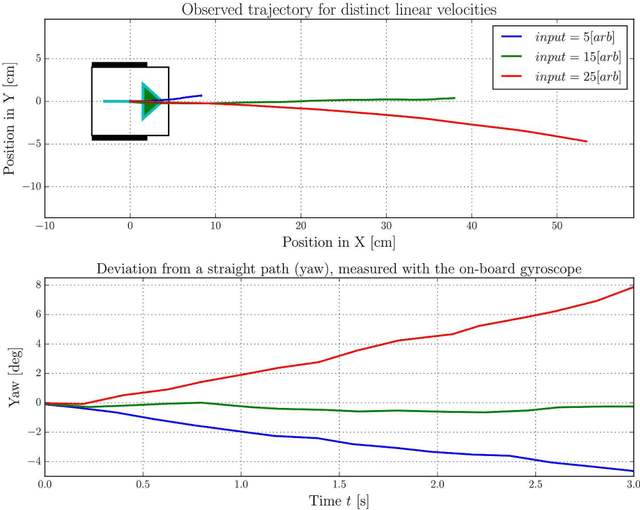
Research in mobile robotics often demands platforms that have an adequate balance between cost and reliability. In the case of terrestrial robots, one of the available options is the GNBot, an open-hardware project intended for the evaluation of swarm search strategies. The lack of basic odometry sensors such as wheel encoders had so far difficulted the implementation of an accurate high-level controller in this platform. Thus, the aim of this thesis is to improve motion control in the GNBot by incorporating a gyroscope whilst maintaining the requisite of no wheel encoders. Among the problems that have been tackled are: accurate in-place rotations, minimal drift during linear motions, and arc-performing functionality. Additionally, the resulting controller is calibrated autonomously by using both the gyroscope module and the infrared rangefinder on board each robot, greatly simplifying the calibration of large swarms. The report first explains the design decisions that were made in order to implement the self-calibration routine, and then evaluates the performance of the new motion controller by means of off-line video tracking. The motion accuracy of the new controller is also compared with the previously existing solution in an odor search experiment.