 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSdf-GAN: Semi-supervised Depth Fusion with Multi-scale Adversarial Networks
Paper and Code
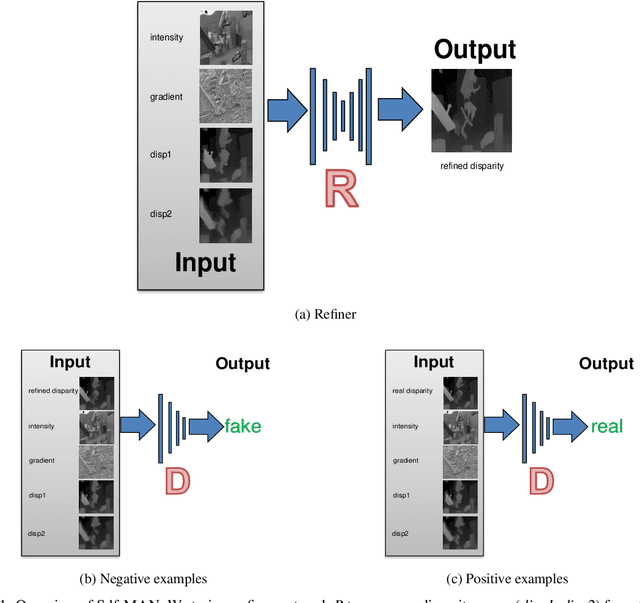
Fusing disparity maps from different algorithms to exploit their complementary advantages is still challenging. Uncertainty estimation and complex disparity relationships between neighboring pixels limit the accuracy and robustness of the existing methods and there is no common method for depth fusion of different kind of data. In this paper, we introduce a method to incorporate supplementary information (intensity, gradient constraints etc.) into a Generative Adversarial Network to better refine each input disparity value. By adopting a multi-scale strategy, the disparity relationship in the fused disparity map is a better estimate of the real distribution. The approach includes a more robust object function to avoid blurry edges, impaints invalid disparity values and requires much fewer ground data to train. The algorithm can be generalized to different kinds of depth fusion. The experiments were conducted through simulation and real data, exploring different fusion opportunities: stereo-monocular fusion from coarse input, stereo-stereo fusion from moderately accurate input, fusion from accurate binocular input and Time of Flight sensor. The experiments show the superiority of the proposed algorithm compared with the most recent algorithms on the public Scene Flow and SYNTH3 datasets. The code is available from https://github.com/Canpu999