 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning for Linear Quadratic Control is Vulnerable Under Cost Manipulation
Paper and Code
Apr 07, 2022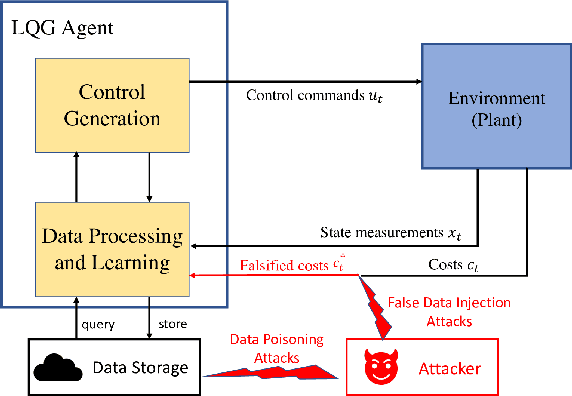
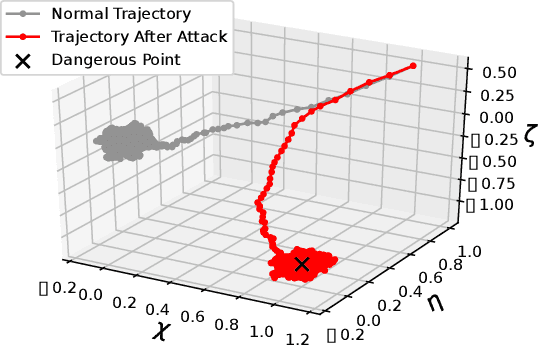
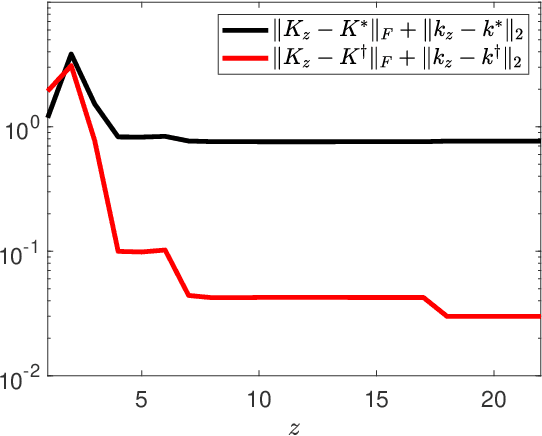
In this work, we study the deception of a Linear-Quadratic-Gaussian (LQG) agent by manipulating the cost signals. We show that a small falsification of the cost parameters will only lead to a bounded change in the optimal policy. The bound is linear on the amount of falsification the attacker can apply to the cost parameters. We propose an attack model where the attacker aims to mislead the agent into learning a `nefarious' policy by intentionally falsifying the cost parameters. We formulate the attack's problem as a convex optimization problem and develop necessary and sufficient conditions to check the achievability of the attacker's goal. We showcase the adversarial manipulation on two types of LQG learners: the batch RL learner and the other is the adaptive dynamic programming (ADP) learner. Our results demonstrate that with only 2.296% of falsification on the cost data, the attacker misleads the batch RL into learning the 'nefarious' policy that leads the vehicle to a dangerous position. The attacker can also gradually trick the ADP learner into learning the same `nefarious' policy by consistently feeding the learner a falsified cost signal that stays close to the actual cost signal. The paper aims to raise people's awareness of the security threats faced by RL-enabled control systems.