 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMARS: Defending Unmanned Aerial Vehicles From Attacks on Inertial Sensors with Model-based Anomaly Detection and Recovery
Paper and Code
May 02, 2025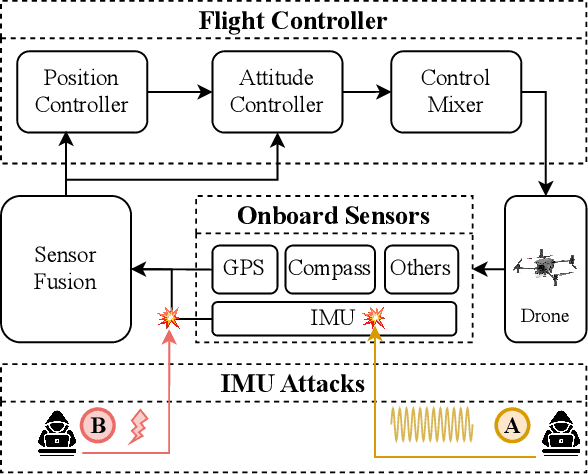
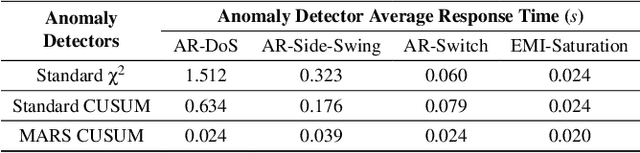
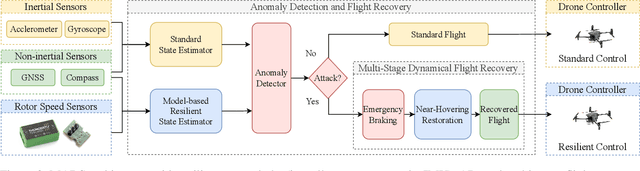
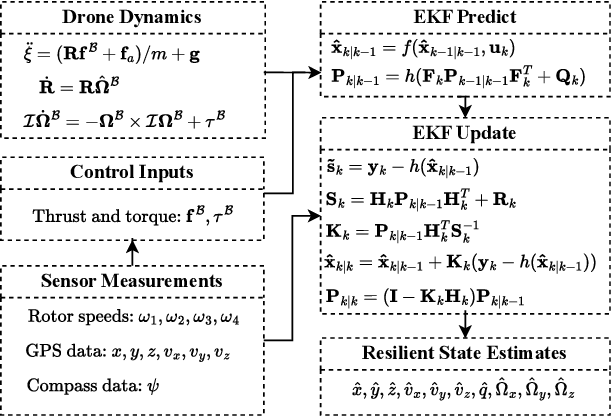
Unmanned Aerial Vehicles (UAVs) rely on measurements from Inertial Measurement Units (IMUs) to maintain stable flight. However, IMUs are susceptible to physical attacks, including acoustic resonant and electromagnetic interference attacks, resulting in immediate UAV crashes. Consequently, we introduce a Model-based Anomaly detection and Recovery System (MARS) that enables UAVs to quickly detect adversarial attacks on inertial sensors and achieve dynamic flight recovery. MARS features an attack-resilient state estimator based on the Extended Kalman Filter, which incorporates position, velocity, heading, and rotor speed measurements to reconstruct accurate attitude and angular velocity information for UAV control. Moreover, a statistical anomaly detection system monitors IMU sensor data, raising a system-level alert if an attack is detected. Upon receiving the alert, a multi-stage dynamic flight recovery strategy suspends the ongoing mission, stabilizes the drone in a hovering condition, and then resumes tasks under the resilient control. Experimental results in PX4 software-in-the-loop environments as well as real-world MARS-PX4 autopilot-equipped drones demonstrate the superiority of our approach over existing IMU-defense frameworks, showcasing the ability of the UAVs to survive attacks and complete the missions.