 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Bayesian Eigenobjects: Combining Linear Subspace and Deep Network Methods for 3D Robot Vision
Paper and Code
Jul 27, 2018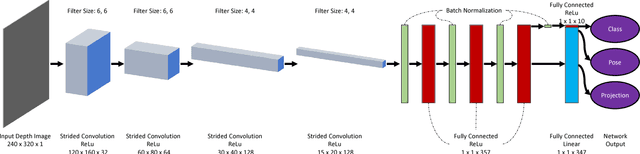
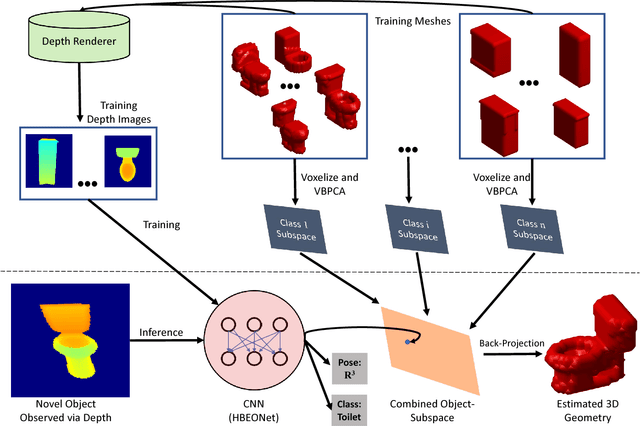


We introduce Hybrid Bayesian Eigenobjects (HBEOs), a novel representation for 3D objects designed to allow a robot to jointly estimate the pose, class, and full 3D geometry of a novel object observed from a single viewpoint in a single practical framework. By combining both linear subspace methods and deep convolutional prediction, HBEOs efficiently learn nonlinear object representations without directly regressing into high-dimensional space. HBEOs also remove the onerous and generally impractical necessity of input data voxelization prior to inference. We experimentally evaluate the suitability of HBEOs to the challenging task of joint pose, class, and shape inference on novel objects and show that, compared to preceding work, HBEOs offer dramatically improved performance in all three tasks along with several orders of magnitude faster runtime performance.