 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReasoning about Noisy Sensors and Effectors in the Situation Calculus
Paper and Code
Sep 09, 1998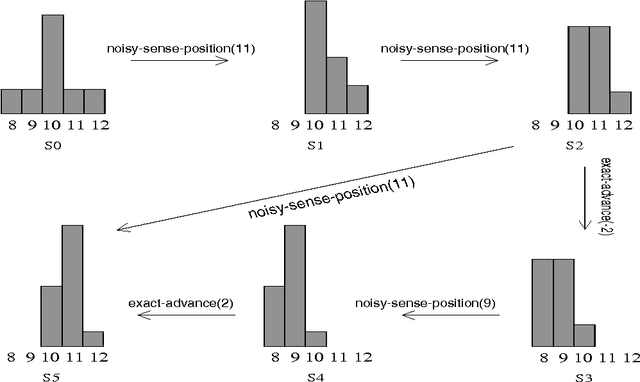
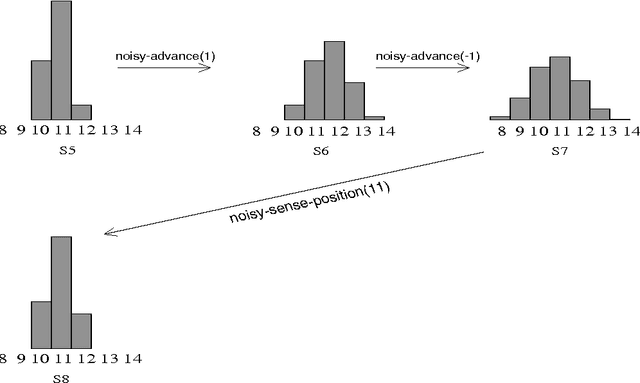
Agents interacting with an incompletely known world need to be able to reason about the effects of their actions, and to gain further information about that world they need to use sensors of some sort. Unfortunately, both the effects of actions and the information returned from sensors are subject to error. To cope with such uncertainties, the agent can maintain probabilistic beliefs about the state of the world. With probabilistic beliefs the agent will be able to quantify the likelihood of the various outcomes of its actions and is better able to utilize the information gathered from its error-prone actions and sensors. In this paper, we present a model in which we can reason about an agent's probabilistic degrees of belief and the manner in which these beliefs change as various actions are executed. We build on a general logical theory of action developed by Reiter and others, formalized in the situation calculus. We propose a simple axiomatization that captures an agent's state of belief and the manner in which these beliefs change when actions are executed. Our model displays a number of intuitively reasonable properties.