Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA State-Based Regression Formulation for Domains with Sensing Actions<br> and Incomplete Information
Paper and Code
Oct 01, 2006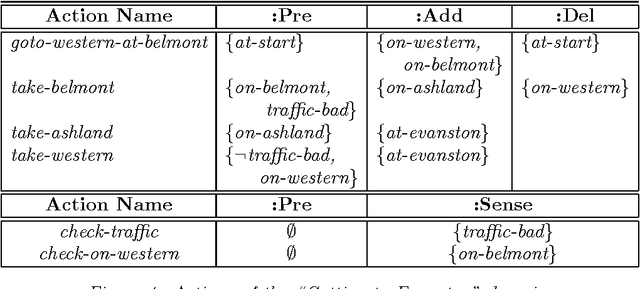
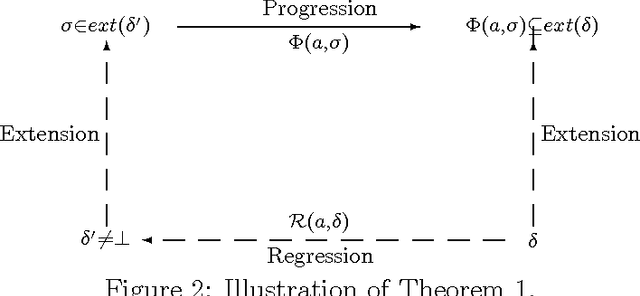
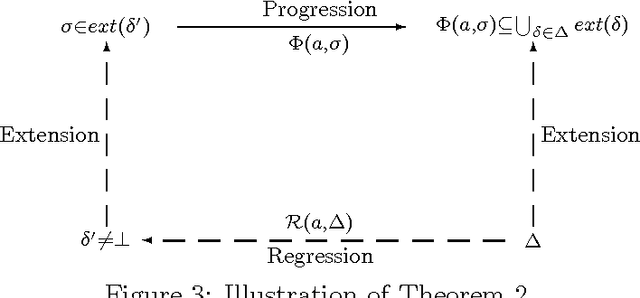
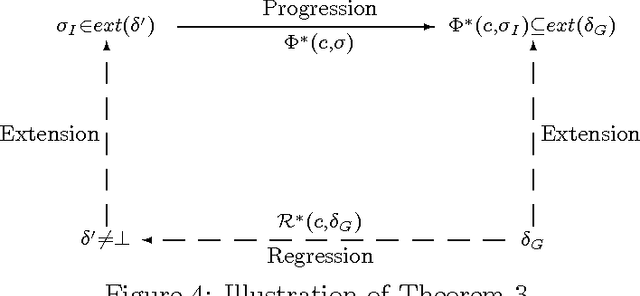
We present a state-based regression function for planning domains where an agent does not have complete information and may have sensing actions. We consider binary domains and employ a three-valued characterization of domains with sensing actions to define the regression function. We prove the soundness and completeness of our regression formulation with respect to the definition of progression. More specifically, we show that (i) a plan obtained through regression for a planning problem is indeed a progression solution of that planning problem, and that (ii) for each plan found through progression, using regression one obtains that plan or an equivalent one.
* Logical Methods in Computer Science, Volume 2, Issue 4 (October 2,
2006) lmcs:2238 * 34 pages, 7 Figures
View paper on