Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Tightly Coupled LiDAR-IMU Odometry through Iterated Point-Level Undistortion
Paper and Code
Sep 28, 2022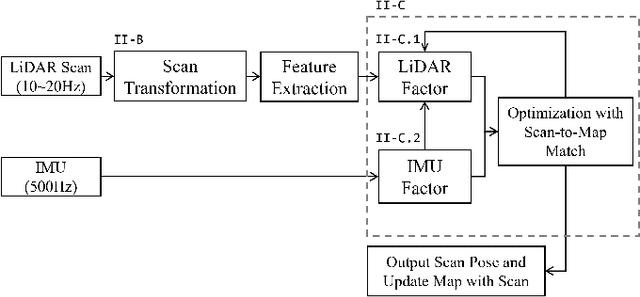
Scan undistortion is a key module for LiDAR odometry in high dynamic environment with high rotation and translation speed. The existing line of studies mostly focuses on one pass undistortion, which means undistortion for each point is conducted only once in the whole LiDAR-IMU odometry pipeline. In this paper, we propose an optimization based tightly coupled LiDAR-IMU odometry addressing iterated point-level undistortion. By jointly minimizing the cost derived from LiDAR and IMU measurements, our LiDAR-IMU odometry method performs more accurate and robust in high dynamic environment. Besides, the method characters good computation efficiency by limiting the quantity of parameters.
View paper on