 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Stack-of-Tasks Approach Combined with Behavior Trees: a New Framework for Robot Control
Paper and Code
Sep 18, 2022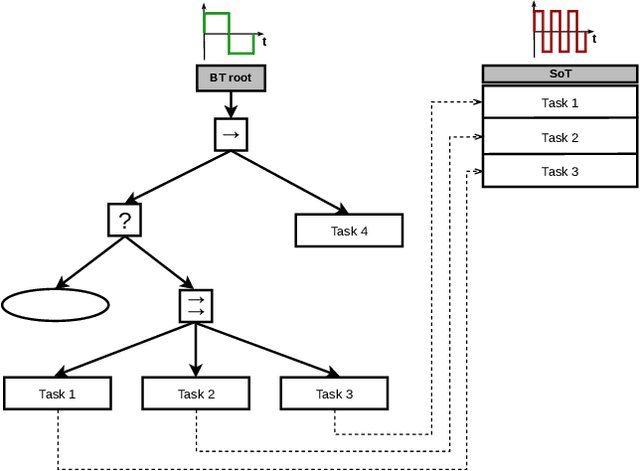
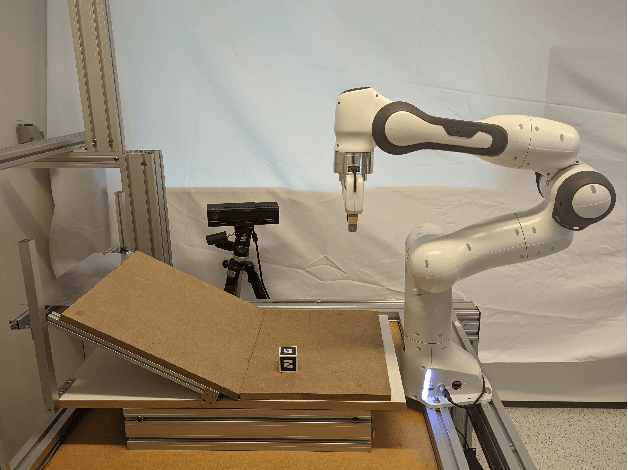
Stack-of-Tasks (SoT) control allows a robot to simultaneously fulfill a number of prioritized goals formulated in terms of (in)equality constraints in error space. Since this approach solves a sequence of Quadratic Programs (QP) at each time-step, without taking into account any temporal state evolution, it is suitable for dealing with local disturbances. However, its limitation lies in the handling of situations that require non-quadratic objectives to achieve a specific goal, as well as situations where countering the control disturbance would require a locally suboptimal action. Recent works address this shortcoming by exploiting Finite State Machines (FSMs) to compose the tasks in such a way that the robot does not get stuck in local minima. Nevertheless, the intrinsic trade-off between reactivity and modularity that characterizes FSMs makes them impractical for defining reactive behaviors in dynamic environments. In this letter, we combine the SoT control strategy with Behavior Trees (BTs), a task switching structure that addresses some of the limitations of the FSMs in terms of reactivity, modularity and re-usability. Experimental results on a Franka Emika Panda 7-DOF manipulator show the robustness of our framework, that allows the robot to benefit from the reactivity of both SoT and BTs.