 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneous Contact Location and Object Pose Estimation Using Proprioceptive Tactile Feedback
Paper and Code
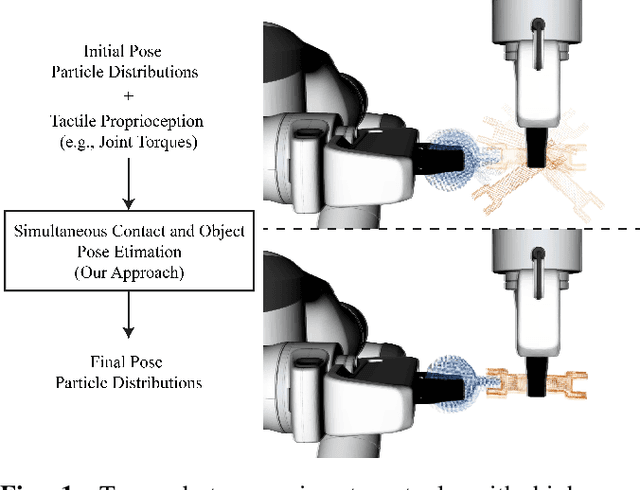
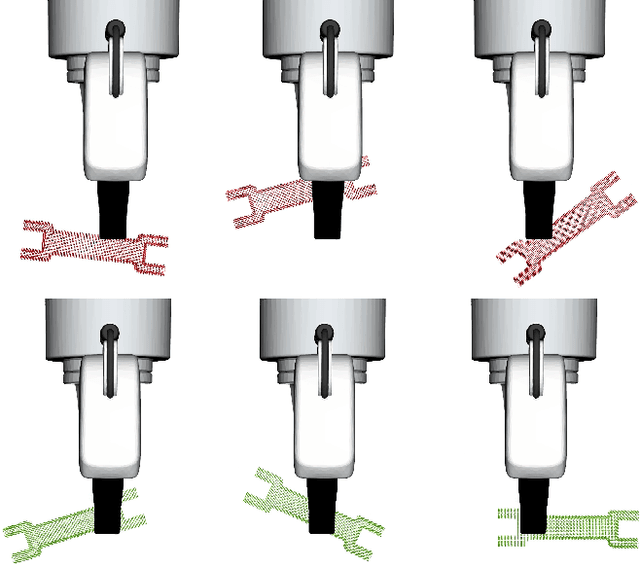

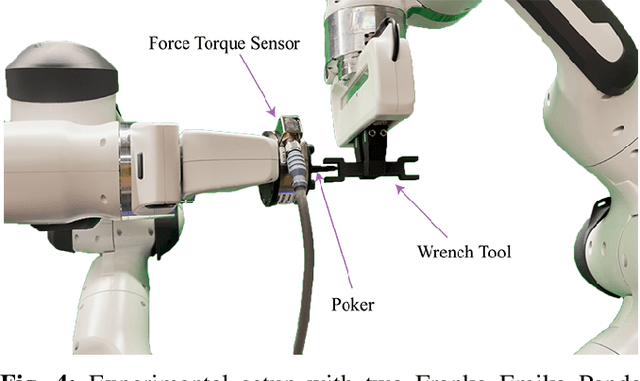
Joint estimation of grasped object pose and externally made contact on the object is central to robust and dexterous manipulation. In this paper, we propose a novel state-estimation algorithm that jointly estimates contact location and object pose in 3D using exclusively proprioceptive tactile feedback. Our approach leverages two complementary particle filters: one to estimate contact location (CPFGrasp) and another to estimate object poses (SCOPE). We implement and evaluate our approach on real-world single-arm and dual-arm robotic systems. We demonstrate how by bringing two objects into contact, the robots can infer contact location and object poses simultaneously. Our proposed method can be applied to a number of downstream tasks that require accurate pose estimates, such as assembly and insertion.