 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariational Inference MPC using Normalizing Flows and Out-of-Distribution Projection
Paper and Code
May 10, 2022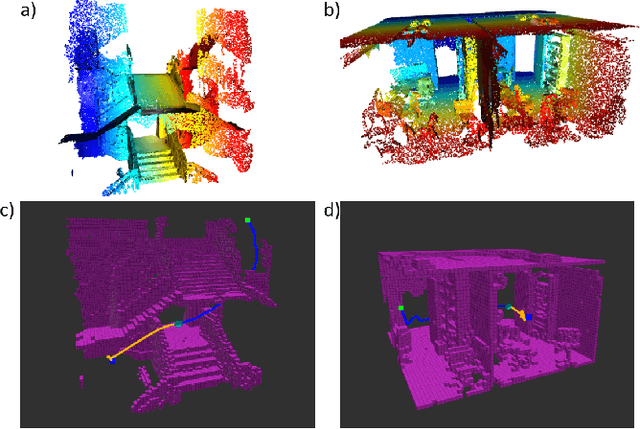
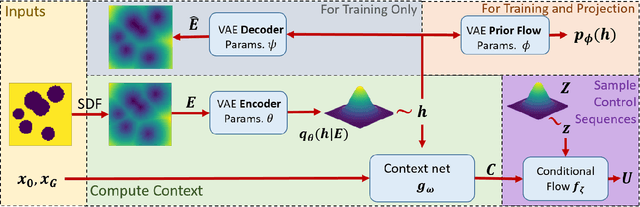
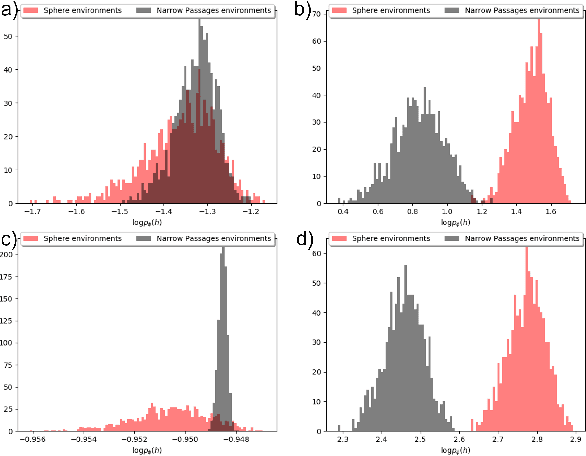
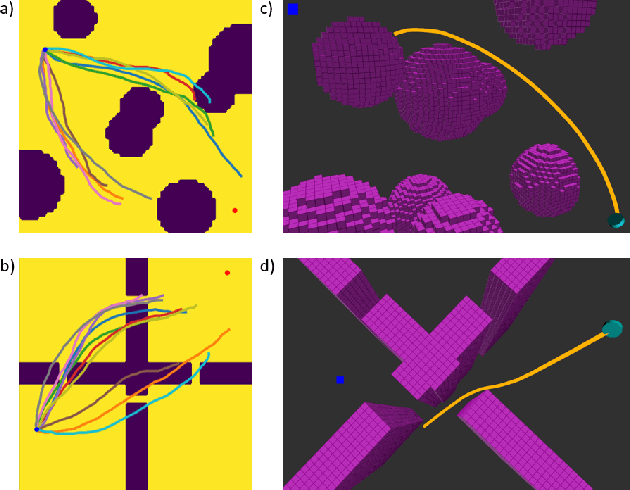
We propose a Model Predictive Control (MPC) method for collision-free navigation that uses amortized variational inference to approximate the distribution of optimal control sequences by training a normalizing flow conditioned on the start, goal and environment. This representation allows us to learn a distribution that accounts for both the dynamics of the robot and complex obstacle geometries. We can then sample from this distribution to produce control sequences which are likely to be both goal-directed and collision-free as part of our proposed FlowMPPI sampling-based MPC method. However, when deploying this method, the robot may encounter an out-of-distribution (OOD) environment, i.e. one which is radically different from those used in training. In such cases, the learned flow cannot be trusted to produce low-cost control sequences. To generalize our method to OOD environments we also present an approach that performs projection on the representation of the environment as part of the MPC process. This projection changes the environment representation to be more in-distribution while also optimizing trajectory quality in the true environment. Our simulation results on a 2D double-integrator and a 3D 12DoF underactuated quadrotor suggest that FlowMPPI with projection outperforms state-of-the-art MPC baselines on both in-distribution and OOD environments, including OOD environments generated from real-world data.