 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNear-Optimal Trajectory Design and Restoration Areas Allocation for UAV-Enabled Grassland Restoration
Paper and Code
Apr 10, 2022
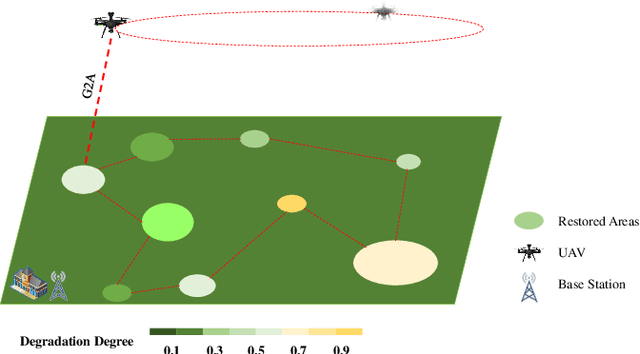
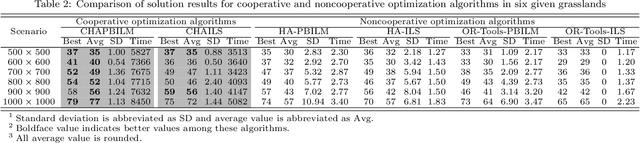
Grassland restoration is a critical means to safeguard grassland ecological degradation. This work considers the maximization restoration areas problem for UAV-enabled grassland restoration method in a restoration process, which is a precise restoration scheme. We first formulate the problem as a multivariable combinatorial optimization problem. By analyzing the characteristics of the optimization problem, it can be decomposed into the two stages: UAV trajectory design and restoration areas allocation. On this basis, the problem can be regarded as a composite problem of traveling salesman problem (TSP) and multidimensional knapsack problem (MKP). Unlike the single combinatorial optimization problem, the coupling relationship between them makes the problem difficult to directly solve by employing the single stage traditional methods. To effectively solve without ignoring the dependence between the two stages, we develop a cooperative optimization algorithm based on heuristic algorithm and population-based incremental learning (PBIL) incorporated with a maximum-residual-energy-based local search (MRELS) strategy, called CHAPBILM, to deal with this problem under constraint conditions of the UAV energy, the total seeds weight, and the number of restored areas. The simulation studies demonstrate that the proposed cooperative optimization method is effective for UAV-enabled grassland restoration problem and can significantly outperform the noncooperative optimization methods, which also verifies the dependency relationship between UAV trajectory design and restoration areas allocation.