 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Instrumented Wheel-On-Limb System of Planetary Rovers for Wheel-Terrain Interactions: System Conception and Preliminary Design
Paper and Code
Apr 06, 2022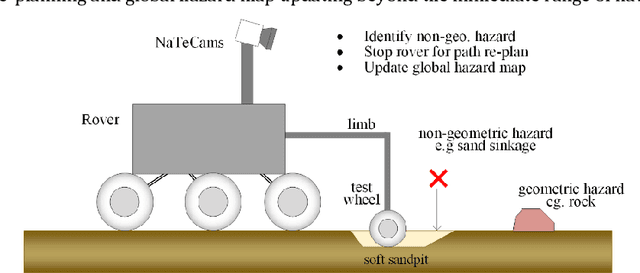
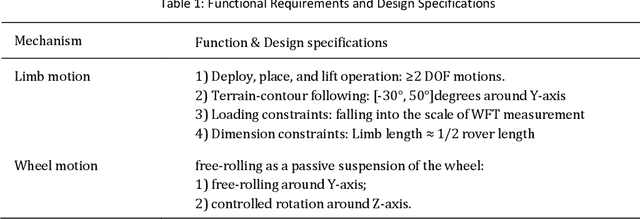
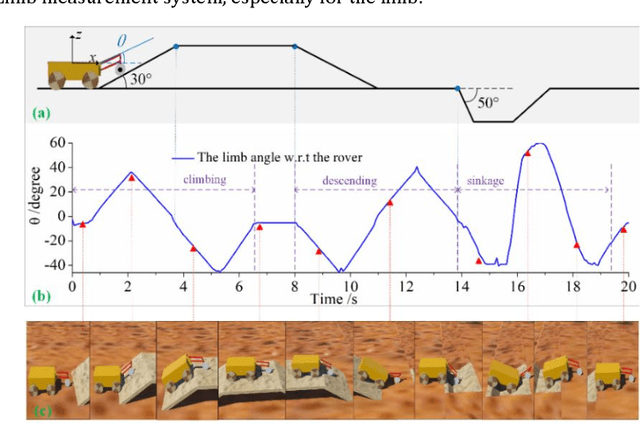
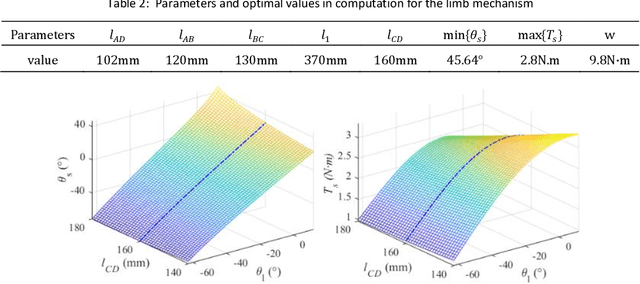
Understanding the wheel-terrain interaction is of great importance to improve the maneuverability and traversability of the rovers. A well-developed sensing device carried by the rover would greatly facilitate the complex risk-reducing operations on sandy terrains. In this paper, an instrumented wheel-on-limb (WOL) system of planetary rovers for wheel-terrain interaction characterization is presented. Assuming the function of a passive suspension of the wheel, the WOL system allows itself to follow the terrain contour, and keep the wheel remain lowered onto the ground during rover motion including climbing and descending, as well as deploy and place the wheel on the ground before a drive commanding. The system concept, functional requirements, and pre-design work, as well as the system integration are presented.