 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-directed Learning of Action Models using Exploratory Planning
Paper and Code
Mar 07, 2022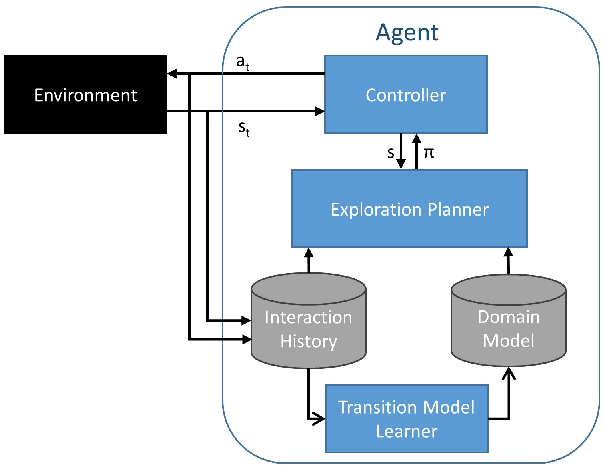
Complex, real-world domains may not be fully modeled for an agent, especially if the agent has never operated in the domain before. The agent's ability to effectively plan and act in such a domain is influenced by its knowledge of when it can perform specific actions and the effects of those actions. We describe a novel exploratory planning agent that is capable of learning action preconditions and effects without expert traces or a given goal. The agent's architecture allows it to perform both exploratory actions as well as goal-directed actions, which opens up important considerations for how exploratory planning and goal planning should be controlled, as well as how the agent's behavior should be explained to any teammates it may have. The contributions of this work include a new representation for contexts called Lifted Linked Clauses, a novel exploration action selection approach using these clauses, an exploration planner that uses lifted linked clauses as goals in order to reach new states, and an empirical evaluation in a scenario from an exploration-focused video game demonstrating that lifted linked clauses improve exploration and action model learning against non-planning baseline agents.