 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUltrasound-Guided Assistive Robots for Scoliosis Assessment with Optimization-based Control and Variable Impedance
Paper and Code
Mar 04, 2022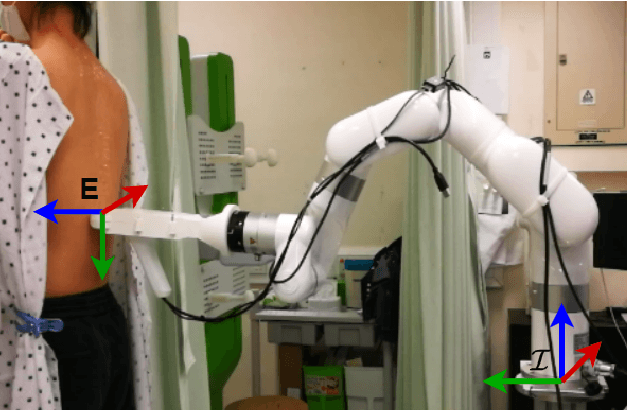

Assistive robots for healthcare have seen a growing demand due to the great potential of relieving medical practitioners from routine jobs. In this paper, we investigate the development of an optimization-based control framework for an ultrasound-guided assistive robot to perform scoliosis assessment. A conventional procedure for scoliosis assessment with ultrasound imaging typically requires a medical practitioner to slide an ultrasound probe along a patient's back. To automate this type of procedure, we need to consider multiple objectives, such as contact force, position, orientation, energy, posture, etc. To address the aforementioned components, we propose to formulate the control framework design as a quadratic programming problem with each objective weighed by its task priority subject to a set of equality and inequality constraints. In addition, as the robot needs to establish constant contact with the patient during spine scanning, we incorporate variable impedance regulation of the end-effector position and orientation in the control architecture to enhance safety and stability during the physical human-robot interaction. Wherein, the variable impedance gains are retrieved by learning from the medical expert's demonstrations. The proposed methodology is evaluated by conducting real-world experiments of autonomous scoliosis assessment with a robot manipulator xArm. The effectiveness is verified by the obtained coronal spinal images of both a phantom and a human subject.