 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwitchHit: A Probabilistic, Complementarity-Based Switching System for Improved Visual Place Recognition in Changing Environments
Paper and Code
Mar 01, 2022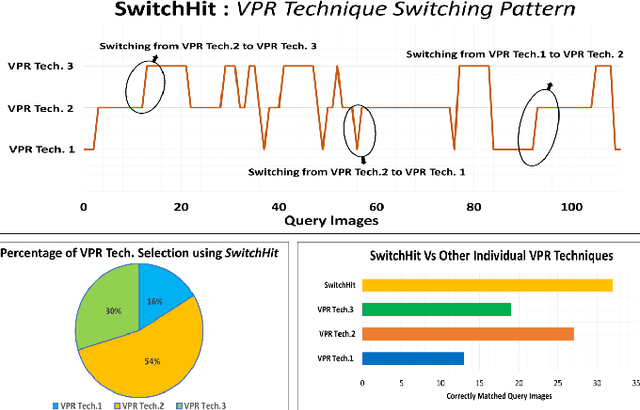
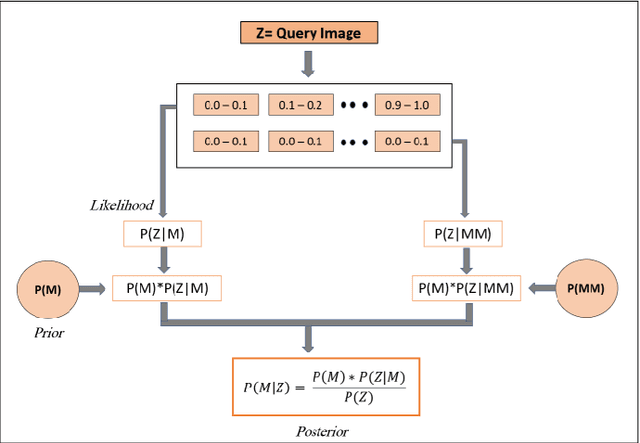
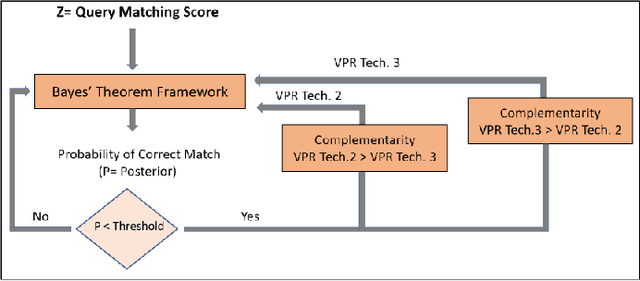
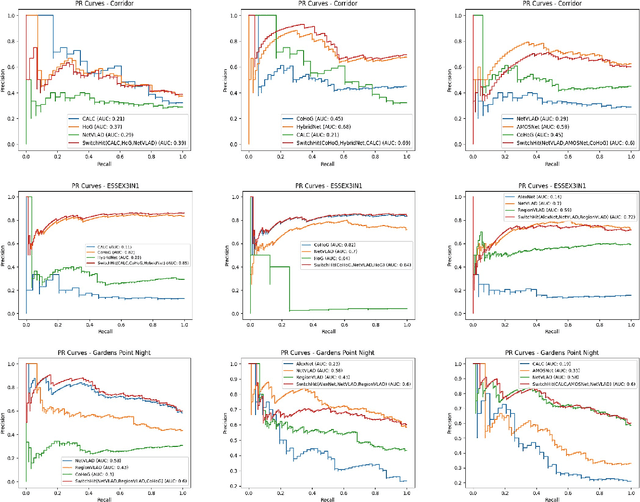
Visual place recognition (VPR), a fundamental task in computer vision and robotics, is the problem of identifying a place mainly based on visual information. Viewpoint and appearance changes, such as due to weather and seasonal variations, make this task challenging. Currently, there is no universal VPR technique that can work in all types of environments, on a variety of robotic platforms, and under a wide range of viewpoint and appearance changes. Recent work has shown the potential of combining different VPR methods intelligently by evaluating complementarity for some specific VPR datasets to achieve better performance. This, however, requires ground truth information (correct matches) which is not available when a robot is deployed in a real-world scenario. Moreover, running multiple VPR techniques in parallel may be prohibitive for resource-constrained embedded platforms. To overcome these limitations, this paper presents a probabilistic complementarity based switching VPR system, SwitchHit. Our proposed system consists of multiple VPR techniques, however, it does not simply run all techniques at once, rather predicts the probability of correct match for an incoming query image and dynamically switches to another complementary technique if the probability of correctly matching the query is below a certain threshold. This innovative use of multiple VPR techniques allow our system to be more efficient and robust than other combined VPR approaches employing brute force and running multiple VPR techniques at once. Thus making it more suitable for resource constrained embedded systems and achieving an overall superior performance from what any individual VPR method in the system could have by achieved running independently.