 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn End-to-End Cascaded Image Deraining and Object Detection Neural Network
Paper and Code
Feb 23, 2022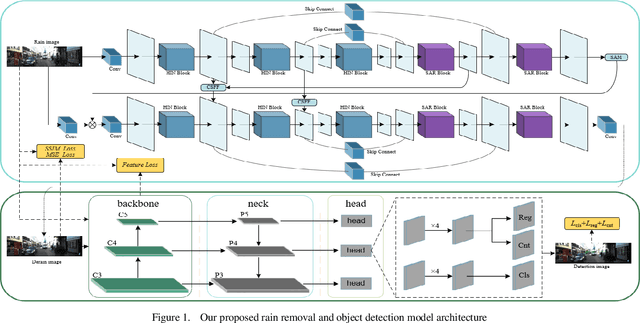
While the deep learning-based image deraining methods have made great progress in recent years, there are two major shortcomings in their application in real-world situations. Firstly, the gap between the low-level vision task represented by rain removal and the high-level vision task represented by object detection is significant, and the low-level vision task can hardly contribute to the high-level vision task. Secondly, the quality of the deraining dataset needs to be improved. In fact, the rain lines in many baselines have a large gap with the real rain lines, and the resolution of the deraining dataset images is generally not ideally. Meanwhile, there are few common datasets for both the low-level vision task and the high-level vision task. In this paper, we explore the combination of the low-level vision task with the high-level vision task. Specifically, we propose an end-to-end object detection network for reducing the impact of rainfall, which consists of two cascaded networks, an improved image deraining network and an object detection network, respectively. We also design the components of the loss function to accommodate the characteristics of the different sub-networks. We then propose a dataset based on the KITTI dataset for rainfall removal and object detection, on which our network surpasses the state-of-the-art with a significant improvement in metrics. Besides, our proposed network is measured on driving videos collected by self-driving vehicles and shows positive results for rain removal and object detection.