 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTPAD: Identifying Effective Trajectory Predictions Under the Guidance of Trajectory Anomaly Detection Model
Paper and Code
Jan 09, 2022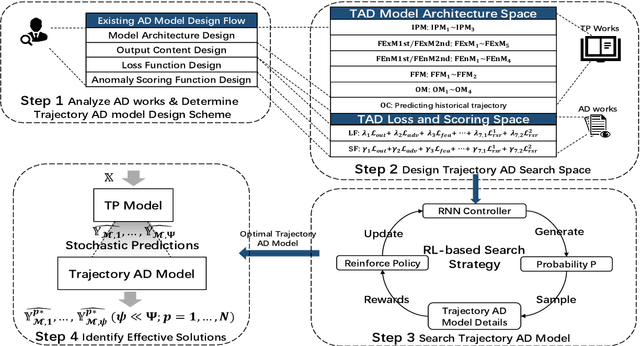
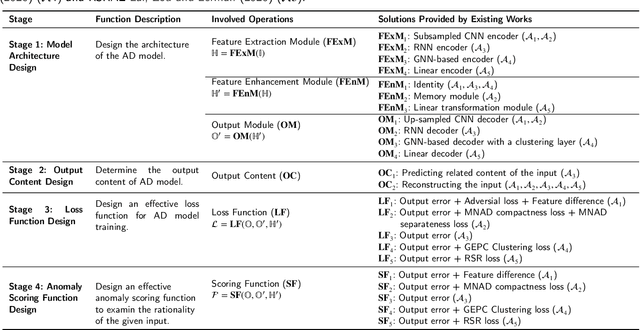
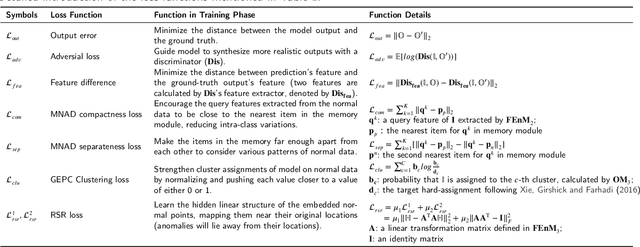
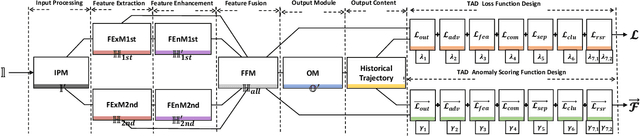
Trajectory Prediction (TP) is an important research topic in computer vision and robotics fields. Recently, many stochastic TP models have been proposed to deal with this problem and have achieved better performance than the traditional models with deterministic trajectory outputs. However, these stochastic models can generate a number of future trajectories with different qualities. They are lack of self-evaluation ability, that is, to examine the rationality of their prediction results, thus failing to guide users to identify high-quality ones from their candidate results. This hinders them from playing their best in real applications. In this paper, we make up for this defect and propose TPAD, a novel TP evaluation method based on the trajectory Anomaly Detection (AD) technique. In TPAD, we firstly combine the Automated Machine Learning (AutoML) technique and the experience in the AD and TP field to automatically design an effective trajectory AD model. Then, we utilize the learned trajectory AD model to examine the rationality of the predicted trajectories, and screen out good TP results for users. Extensive experimental results demonstrate that TPAD can effectively identify near-optimal prediction results, improving stochastic TP models' practical application effect.