 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating the Robustness of Deep Reinforcement Learning for Autonomous and Adversarial Policies in a Multi-agent Urban Driving Environment
Paper and Code
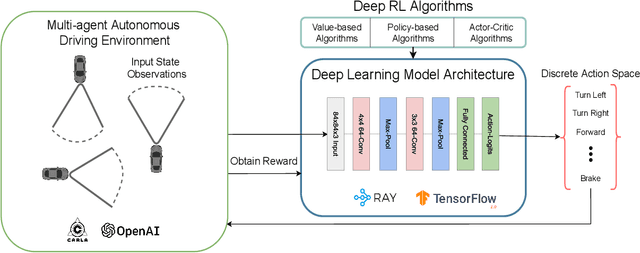
Deep reinforcement learning is actively used for training autonomous driving agents in a vision-based urban simulated environment. Due to the large availability of various reinforcement learning algorithms, we are still unsure of which one works better while training autonomous cars in single-agent as well as multi-agent driving environments. A comparison of deep reinforcement learning in vision-based autonomous driving will open up the possibilities for training better autonomous car policies. Also, autonomous cars trained on deep reinforcement learning-based algorithms are known for being vulnerable to adversarial attacks, and we have less information on which algorithms would act as a good adversarial agent. In this work, we provide a systematic evaluation and comparative analysis of 6 deep reinforcement learning algorithms for autonomous and adversarial driving in four-way intersection scenario. Specifically, we first train autonomous cars using state-of-the-art deep reinforcement learning algorithms. Second, we test driving capabilities of the trained autonomous policies in single-agent as well as multi-agent scenarios. Lastly, we use the same deep reinforcement learning algorithms to train adversarial driving agents, in order to test the driving performance of autonomous cars and look for possible collision and offroad driving scenarios. We perform experiments by using vision-only high fidelity urban driving simulated environments.