 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Deep Reinforcement Learning for Trustworthy Autonomous Driving Policies
Paper and Code
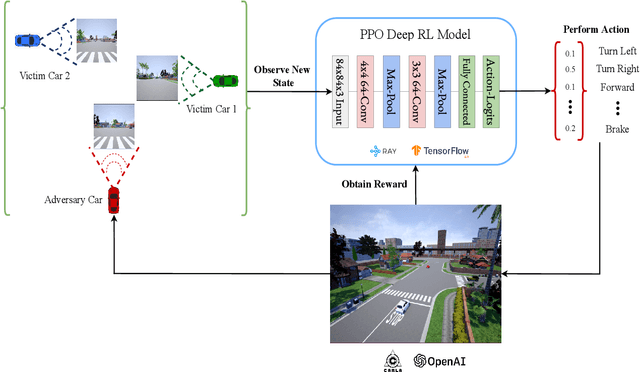
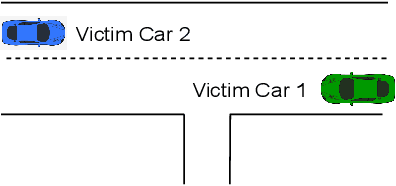
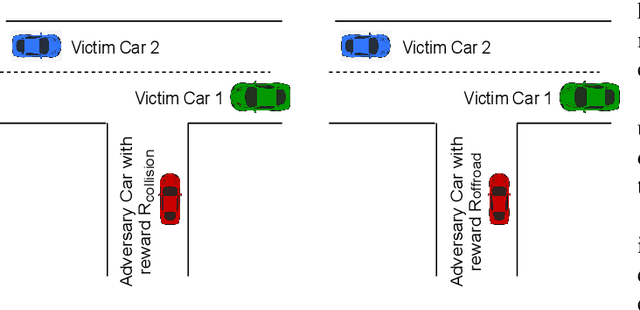
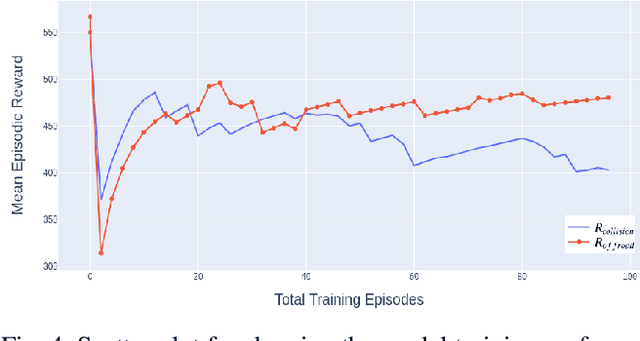
Deep reinforcement learning is widely used to train autonomous cars in a simulated environment. Still, autonomous cars are well known for being vulnerable when exposed to adversarial attacks. This raises the question of whether we can train the adversary as a driving agent for finding failure scenarios in autonomous cars, and then retrain autonomous cars with new adversarial inputs to improve their robustness. In this work, we first train and compare adversarial car policy on two custom reward functions to test the driving control decision of autonomous cars in a multi-agent setting. Second, we verify that adversarial examples can be used not only for finding unwanted autonomous driving behavior, but also for helping autonomous driving cars in improving their deep reinforcement learning policies. By using a high fidelity urban driving simulation environment and vision-based driving agents, we demonstrate that the autonomous cars retrained using the adversary player noticeably increase the performance of their driving policies in terms of reducing collision and offroad steering errors.