 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemonstration Informed Specification Search
Paper and Code
Dec 20, 2021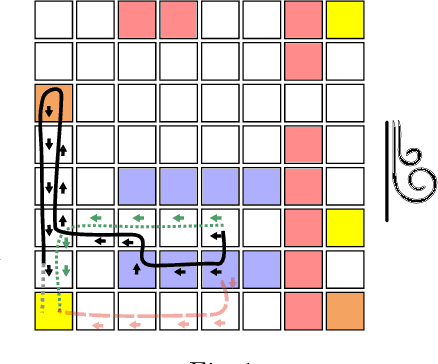
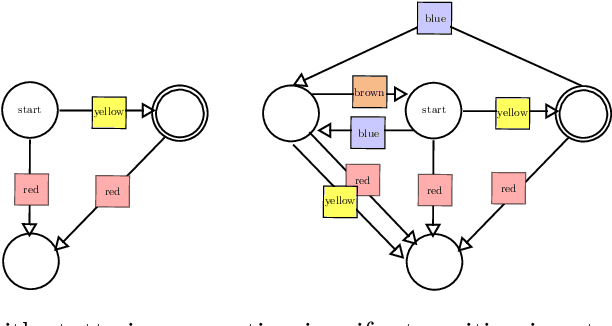
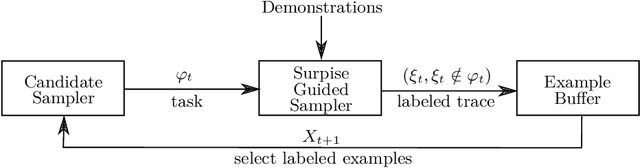
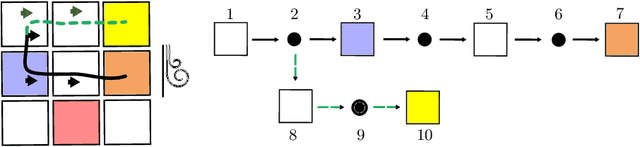
This paper considers the problem of learning history dependent task specifications, e.g. automata and temporal logic, from expert demonstrations. Unfortunately, the (countably infinite) number of tasks under consideration combined with an a-priori ignorance of what historical features are needed to encode the demonstrated task makes existing approaches to learning tasks from demonstrations inapplicable. To address this deficit, we propose Demonstration Informed Specification Search (DISS): a family of algorithms parameterized by black box access to (i) a maximum entropy planner and (ii) an algorithm for identifying concepts, e.g., automata, from labeled examples. DISS works by alternating between (i) conjecturing labeled examples to make the demonstrations less surprising and (ii) sampling concepts consistent with the current labeled examples. In the context of tasks described by deterministic finite automata, we provide a concrete implementation of DISS that efficiently combines partial knowledge of the task and a single expert demonstration to identify the full task specification.