 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Lookahead Pure-Pursuit for Autonomous Racing
Paper and Code
Nov 17, 2021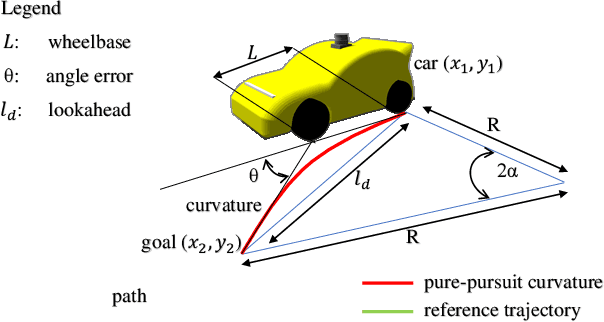

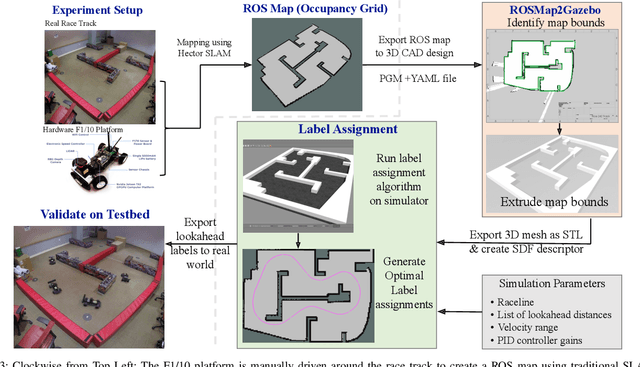
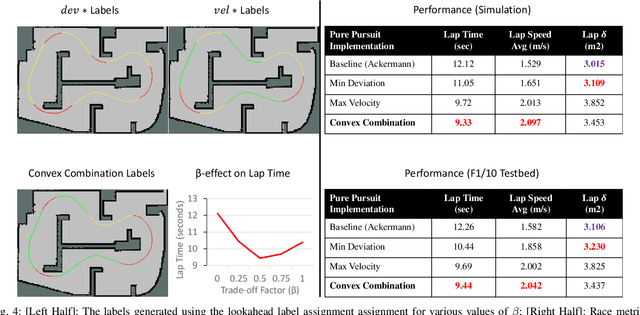
This paper presents an adaptive lookahead pure-pursuit lateral controller for optimizing racing metrics such as lap time, average lap speed, and deviation from a reference trajectory in an autonomous racing scenario. We propose a greedy algorithm to compute and assign optimal lookahead distances for the pure-pursuit controller for each waypoint on a reference trajectory for improving the race metrics. We use a ROS based autonomous racing simulator to evaluate the adaptive pure-pursuit algorithm and compare our method with several other pure-pursuit based lateral controllers. We also demonstrate our approach on a scaled real testbed using a F1/10 autonomous racecar. Our method results in a significant improvement (20%) in the racing metrics for an autonomous racecar.