 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Optimal Control with Stochastic Models of Hamiltonian Dynamics
Paper and Code
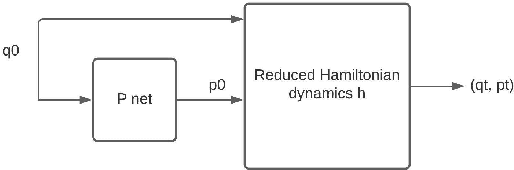

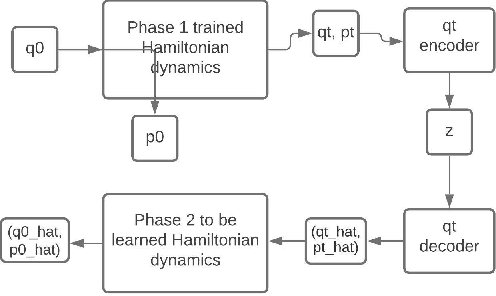

Optimal control problems can be solved by first applying the Pontryagin maximum principle, followed by computing a solution of the corresponding unconstrained Hamiltonian dynamical system. In this paper, and to achieve a balance between robustness and efficiency, we learn a reduced Hamiltonian of the unconstrained Hamiltonian. This reduced Hamiltonian is learned by going backward in time and by minimizing the loss function resulting from application of the Pontryagin maximum principle conditions. The robustness of our learning process is then further improved by progressively learning a posterior distribution of reduced Hamiltonians. This leads to a more efficient sampling of the generalized coordinates (position, velocity) of our phase space. Our solution framework applies to not only optimal control problems with finite-dimensional phase (state) spaces but also the infinite dimensional case.