 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to Sense the World: Leveraging Hierarchy in Multimodal Perception for Robust Reinforcement Learning Agents
Paper and Code
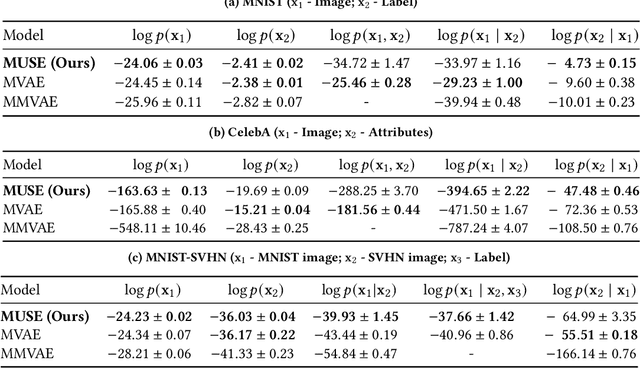
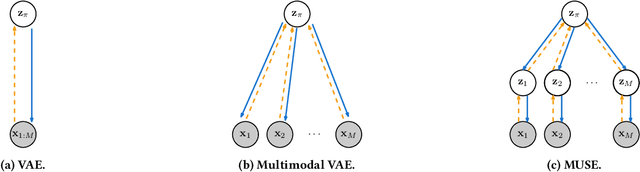
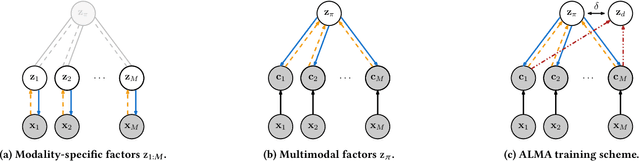
This work addresses the problem of sensing the world: how to learn a multimodal representation of a reinforcement learning agent's environment that allows the execution of tasks under incomplete perceptual conditions. To address such problem, we argue for hierarchy in the design of representation models and contribute with a novel multimodal representation model, MUSE. The proposed model learns hierarchical representations: low-level modality-specific representations, encoded from raw observation data, and a high-level multimodal representation, encoding joint-modality information to allow robust state estimation. We employ MUSE as the sensory representation model of deep reinforcement learning agents provided with multimodal observations in Atari games. We perform a comparative study over different designs of reinforcement learning agents, showing that MUSE allows agents to perform tasks under incomplete perceptual experience with minimal performance loss. Finally, we evaluate the performance of MUSE in literature-standard multimodal scenarios with higher number and more complex modalities, showing that it outperforms state-of-the-art multimodal variational autoencoders in single and cross-modality generation.