 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBimanual Telemanipulation with Force and Haptic Feedback and Predictive Limit Avoidance
Paper and Code
Sep 27, 2021
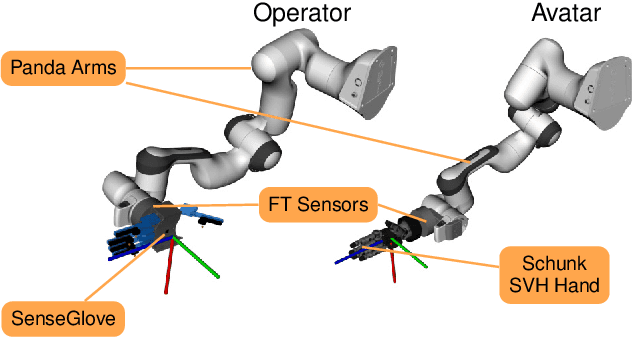
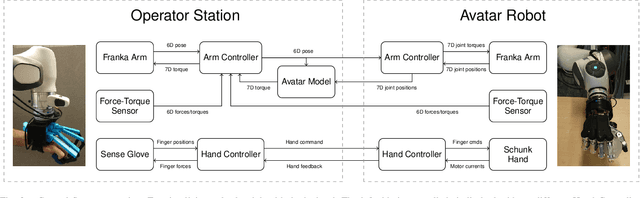
Robotic teleoperation is a key technology for a wide variety of applications. It allows sending robots instead of humans in remote, possibly dangerous locations while still using the human brain with its enormous knowledge and creativity, especially for solving unexpected problems. A main challenge in teleoperation consists of providing enough feedback to the human operator for situation awareness and thus create full immersion, as well as offering the operator suitable control interfaces to achieve efficient and robust task fulfillment. We present a bimanual telemanipulation system consisting of an anthropomorphic avatar robot and an operator station providing force and haptic feedback to the human operator. The avatar arms are controlled in Cartesian space with a 1:1 mapping of the operator movements. The measured forces and torques on the avatar side are haptically displayed directly to the operator. We developed a predictive avatar model for limit avoidance which runs on the operator side, ensuring low latency. Only off-the-shelf components were used to build the system. It is evaluated in lab experiments and by untrained operators in a small user study.