 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Anytime CLF Reactive Planning System for a Bipedal Robot on Undulating Terrain
Paper and Code
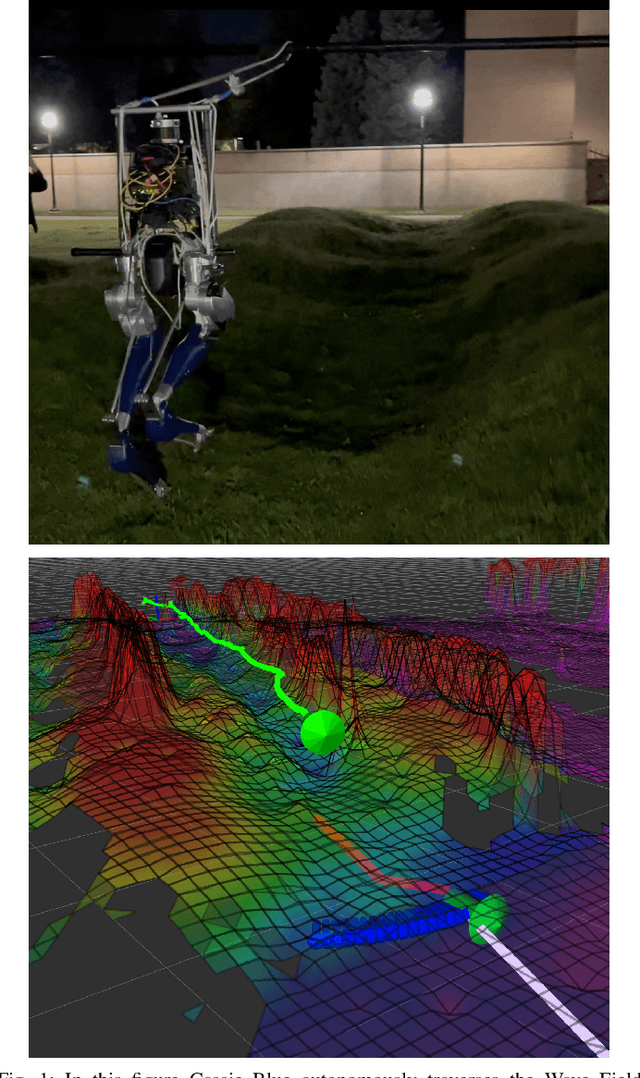
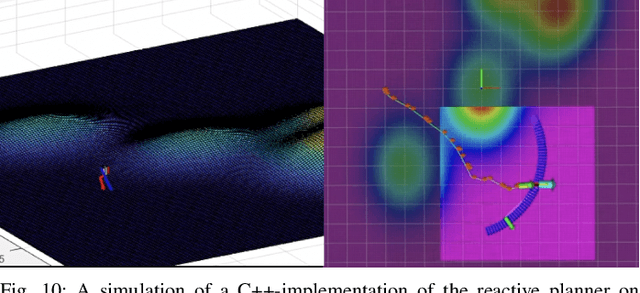
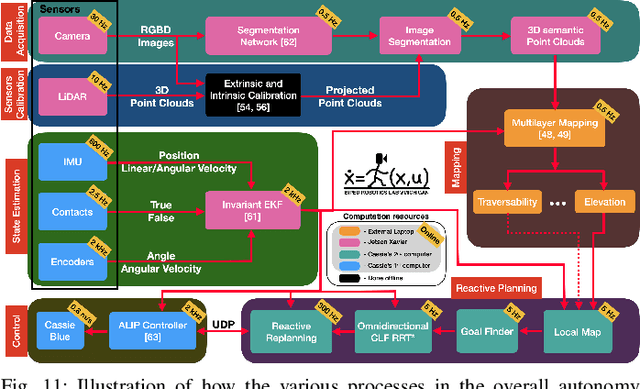
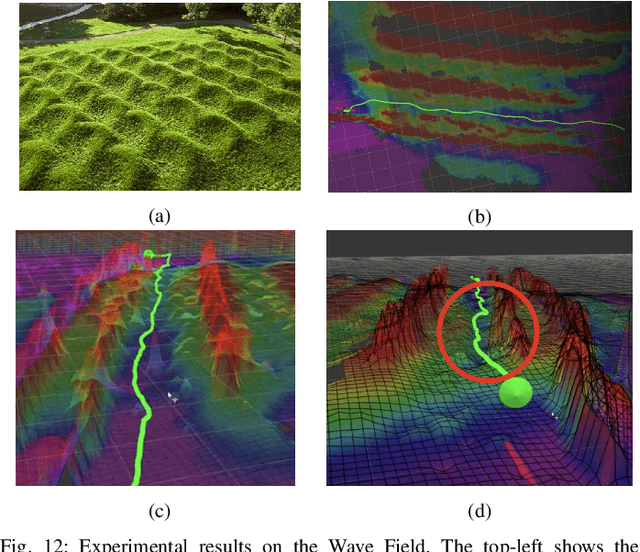
We propose and experimentally demonstrate a reactive planning system for bipedal robots on unexplored, challenging terrains. The system consists of a low-frequency planning thread (5 Hz) to find an asymptotically optimal path and a high-frequency reactive thread (300 Hz) to accommodate robot deviation. The planning thread includes: a multi-layer local map to compute traversability for the robot on the terrain; an anytime omnidirectional Control Lyapunov Function (CLF) for use with a Rapidly Exploring Random Tree Star (RRT*) that generates a vector field for specifying motion between nodes; a sub-goal finder when the final goal is outside of the current map; and a finite-state machine to handle high-level mission decisions. The system also includes a reactive thread to obviate the non-smooth motions that arise with traditional RRT* algorithms when performing path following. The reactive thread copes with robot deviation while eliminating non-smooth motions via a vector field (defined by a closed-loop feedback policy) that provides real-time control commands to the robot's gait controller as a function of instantaneous robot pose. The system is evaluated on various challenging outdoor terrains and cluttered indoor scenes in both simulation and experiment on Cassie Blue, a bipedal robot with 20 degrees of freedom. All implementations are coded in C++ with the Robot Operating System (ROS) and are available at https://github.com/UMich-BipedLab/CLF_reactive_planning_system.