 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTotal Least Squares for Optimal Pose Estimation
Paper and Code
Jun 22, 2021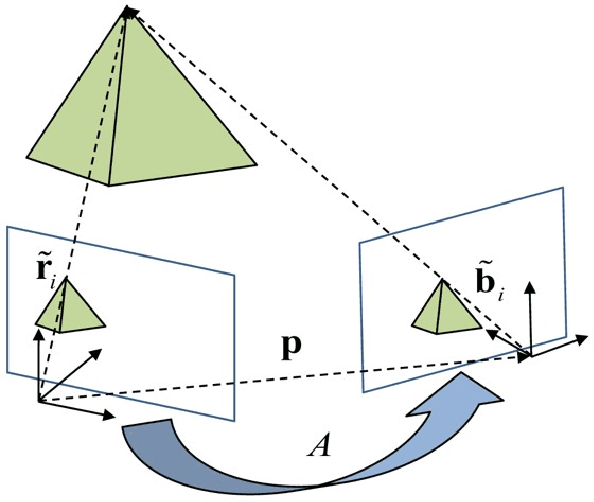
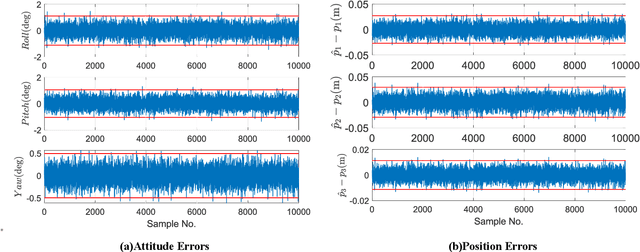
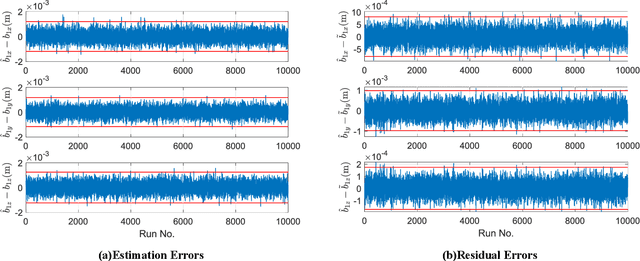
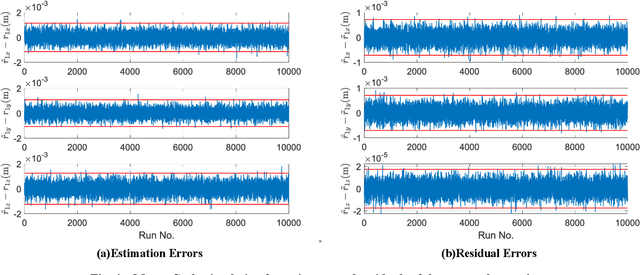
This work provides a theoretical framework for the pose estimation problem using total least squares for vector observations from landmark features. First, the optimization framework is formulated for the pose estimation problem with observation vectors extracted from point cloud features. Then, error-covariance expressions are derived. The attitude and position solutions obtained via the derived optimization framework are proven to reach the bounds defined by the Cram\'er-Rao lower bound under the small angle approximation of attitude errors. The measurement data for the simulation of this problem is provided through a series of vector observation scans, and a fully populated observation noise-covariance matrix is assumed as the weight in the cost function to cover for the most general case of the sensor uncertainty. Here, previous derivations are expanded for the pose estimation problem to include more generic cases of correlations in the errors than previously cases involving an isotropic noise assumption. The proposed solution is simulated in a Monte-Carlo framework with 10,000 samples to validate the error-covariance analysis.