Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCenterAtt: Fast 2-stage Center Attention Network
Paper and Code
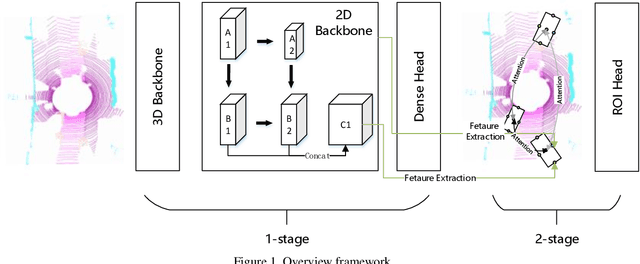
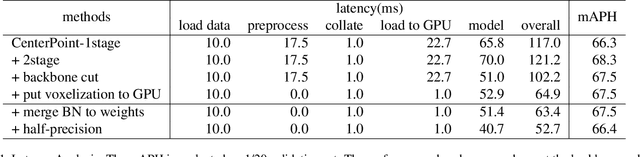
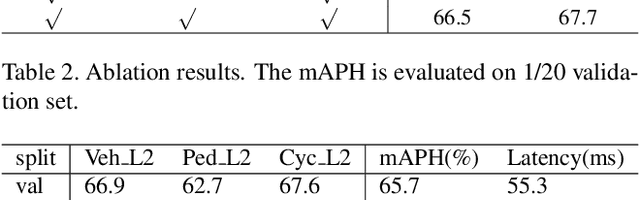
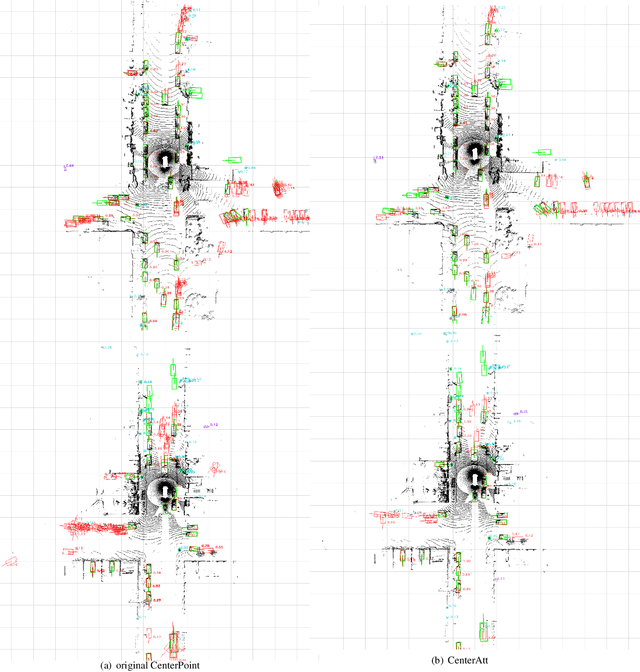
In this technical report, we introduce the methods of HIKVISION_LiDAR_Det in the challenge of waymo open dataset real-time 3D detection. Our solution for the competition are built upon Centerpoint 3D detection framework. Several variants of CenterPoint are explored, including center attention head and feature pyramid network neck. In order to achieve real time detection, methods like batchnorm merge, half-precision floating point network and GPU-accelerated voxelization process are adopted. By using these methods, our team ranks 6th among all the methods on real-time 3D detection challenge in the waymo open dataset.
View paper on