 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle View Geocentric Pose in the Wild
Paper and Code
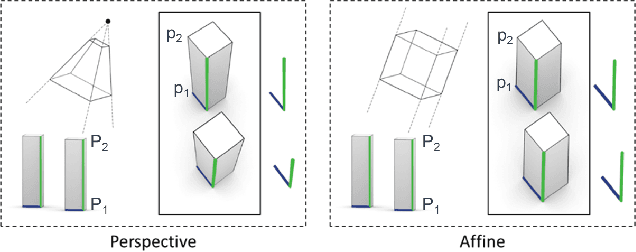
Current methods for Earth observation tasks such as semantic mapping, map alignment, and change detection rely on near-nadir images; however, often the first available images in response to dynamic world events such as natural disasters are oblique. These tasks are much more difficult for oblique images due to observed object parallax. There has been recent success in learning to regress geocentric pose, defined as height above ground and orientation with respect to gravity, by training with airborne lidar registered to satellite images. We present a model for this novel task that exploits affine invariance properties to outperform state of the art performance by a wide margin. We also address practical issues required to deploy this method in the wild for real-world applications. Our data and code are publicly available.