 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTarget-Following Double Deep Q-Networks for UAVs
Paper and Code
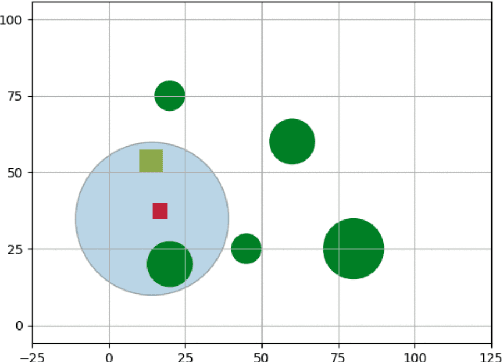
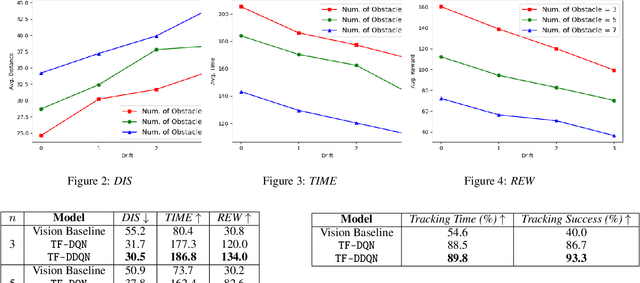

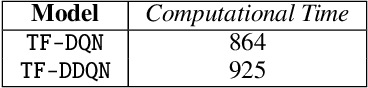
Target tracking in unknown real-world environments in the presence of obstacles and target motion uncertainty demand agents to develop an intrinsic understanding of the environment in order to predict the suitable actions to be taken at each time step. This task requires the agents to maximize the visibility of the mobile target maneuvering randomly in a network of roads by learning a policy that takes into consideration the various aspects of a real-world environment. In this paper, we propose a DDQN-based extension to the state-of-the-art in target tracking using a UAV TF-DQN, that we call TF-DDQN, that isolates the value estimation and evaluation steps. Additionally, in order to carefully benchmark the performance of any given target tracking algorithm, we introduce a novel target tracking evaluation scheme that quantifies its efficacy in terms of a wide set of diverse parameters. To replicate the real-world setting, we test our approach against standard baselines for the task of target tracking in complex environments with varying drift conditions and changes in environmental configuration.