Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Multi-Adaptive-Resolution-Surfel 6D LiDAR Odometry using Continuous-time Trajectory Optimization
Paper and Code
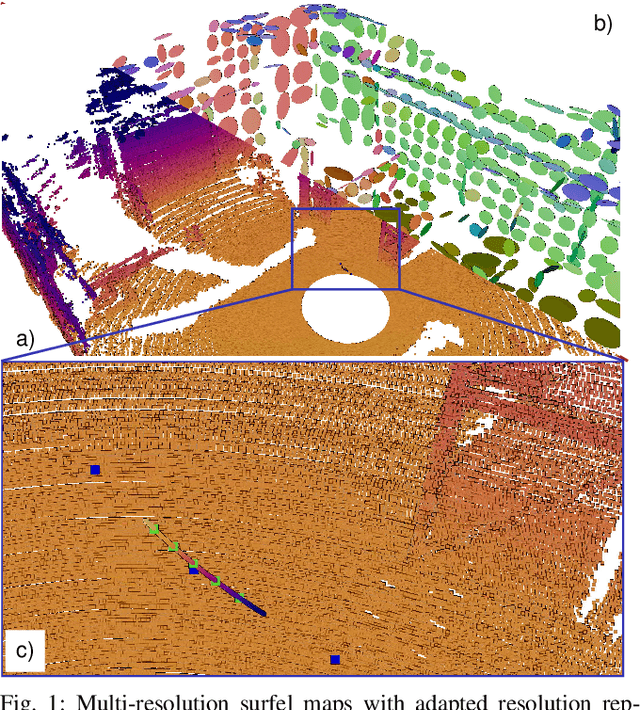
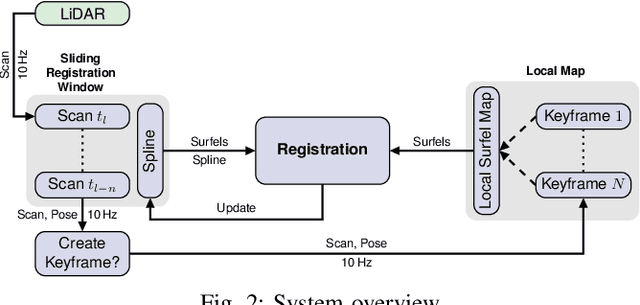
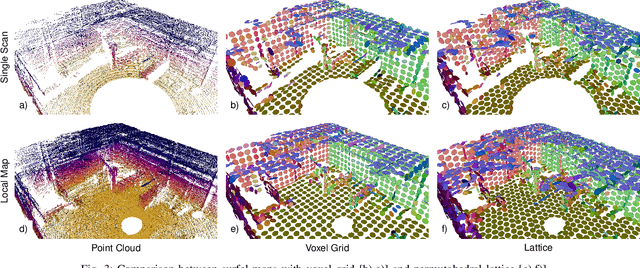
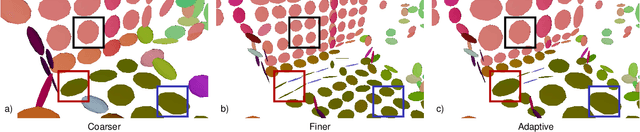
Simultaneous Localization and Mapping (SLAM) is an essential capability for autonomous robots, but due to high data rates of 3D LiDARs real-time SLAM is challenging. We propose a real-time method for 6D LiDAR odometry. Our approach combines a continuous-time B-Spline trajectory representation with a Gaussian Mixture Model (GMM) formulation to jointly align local multi-resolution surfel maps. Sparse voxel grids and permutohedral lattices ensure fast access to map surfels, and an adaptive resolution selection scheme effectively speeds up registration. A thorough experimental evaluation shows the performance of our approach on two datasets and during real-robot experiments.
View paper on