 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning What To Do by Simulating the Past
Paper and Code
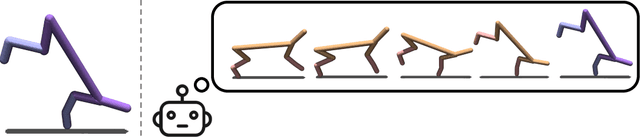
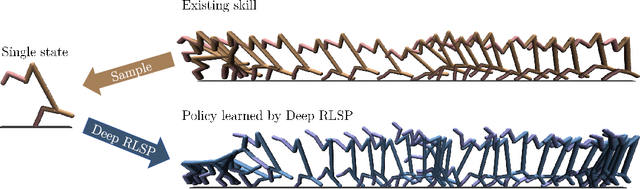
Since reward functions are hard to specify, recent work has focused on learning policies from human feedback. However, such approaches are impeded by the expense of acquiring such feedback. Recent work proposed that agents have access to a source of information that is effectively free: in any environment that humans have acted in, the state will already be optimized for human preferences, and thus an agent can extract information about what humans want from the state. Such learning is possible in principle, but requires simulating all possible past trajectories that could have led to the observed state. This is feasible in gridworlds, but how do we scale it to complex tasks? In this work, we show that by combining a learned feature encoder with learned inverse models, we can enable agents to simulate human actions backwards in time to infer what they must have done. The resulting algorithm is able to reproduce a specific skill in MuJoCo environments given a single state sampled from the optimal policy for that skill.