Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA simple and robust method for noise variance estimation for time-varying signals
Paper and Code
Apr 07, 2021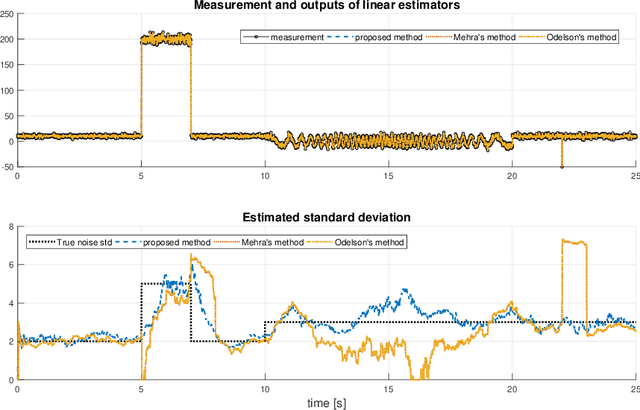
In this brief paper, we present a simple approach to estimate the variance of measurement noise with time-varying 1-D signals. The proposed approach exploits the relationship between the noise variance and the variance of the prediction errors (or innovation sequence) of a linear estimator, the idea that was pioneered by [9] and [2]. Compared with the classic and more recent methods in the same category, the proposed method can render more robust estimates with the presence of unmodelled dynamics and outliers in the measurement.
View paper on