 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncreasing the Efficiency of Policy Learning for Autonomous Vehicles by Multi-Task Representation Learning
Paper and Code
Mar 26, 2021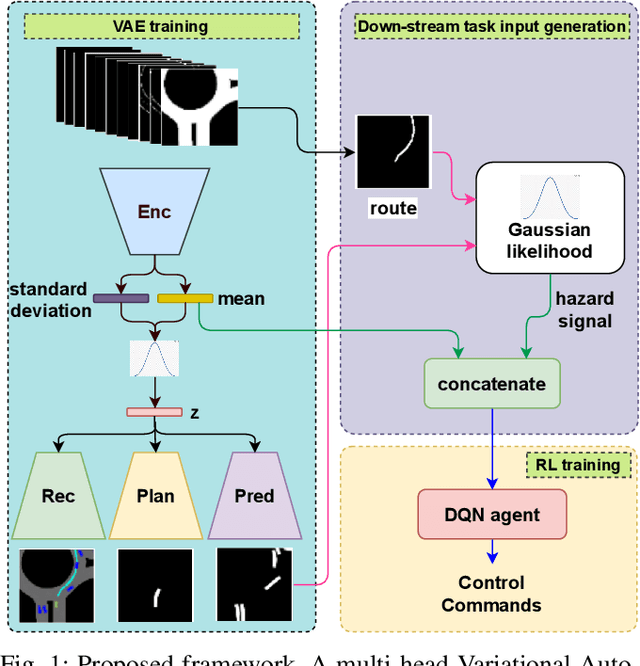
Driving in a dynamic, multi-agent, and complex urban environment is a difficult task requiring a complex decision-making policy. The learning of such a policy requires a state representation that can encode the entire environment. Mid-level representations that encode a vehicle's environment as images have become a popular choice. Still, they are quite high-dimensional, limiting their use in data-hungry approaches such as reinforcement learning. In this article, we propose to learn a low-dimensional and rich latent representation of the environment by leveraging the knowledge of relevant semantic factors. To do this, we train an encoder-decoder deep neural network to predict multiple application-relevant factors such as the trajectories of other agents and the ego car. We also propose a hazard signal in addition to the learned latent representation as input to a down-stream policy. We demonstrate that using the multi-head encoder-decoder neural network results in a more informative representation than a standard single-head model. In particular, the proposed representation learning and the hazard signal help reinforcement learning to learn faster, with increased performance and less data than baseline methods.